Computer System
Bir bilgisayar sisteminin genel olarak 4 bileşeni vardır.
- Donanım (İşlemci (CPU), belek ve I/O üniteleri gibi)
- İşletim Sistemi (Ms-Dos, Unix, OS/2, Linux, Android, iOS, Windows vs gibi)
- Sistem Yazılımları (Derleyiciler, Veritabanı ve Network Yazılımları)
- Uygulama Yazılımları (Kullanıcıların kendi geliştirdikleri yazılımlar)
Modern bir bilgisayar sistemi, bir veya birden fazla işlemci (ya da diğer bir söylemle “CPU”), gerçek bellek (RAM), saatler, terminaller, diskler, bilgisayar ağı (network) birimleri, yazıcı üniteleri, CD sürücüsü, disket ve teyp üniteleri gibi I/O ünitelerinden oluşmaktadır.
Doğal olarak bir bilgisayar sistemi oldukça karmaşık bir yapıdadır.
Autonomous Robot
Otonom robot, insan kontrolüne başvurmadan da hareket edebilen bilgisayar sistemi .
Tarihi örneklemleri arasında uzay gezginleri, modern örneklemleri arasında kendi kendine süpürebilen elektrikli süpürgeler ve kendi kendine gidebilen elektrikli arabalar başlıca uygulama uzayları.
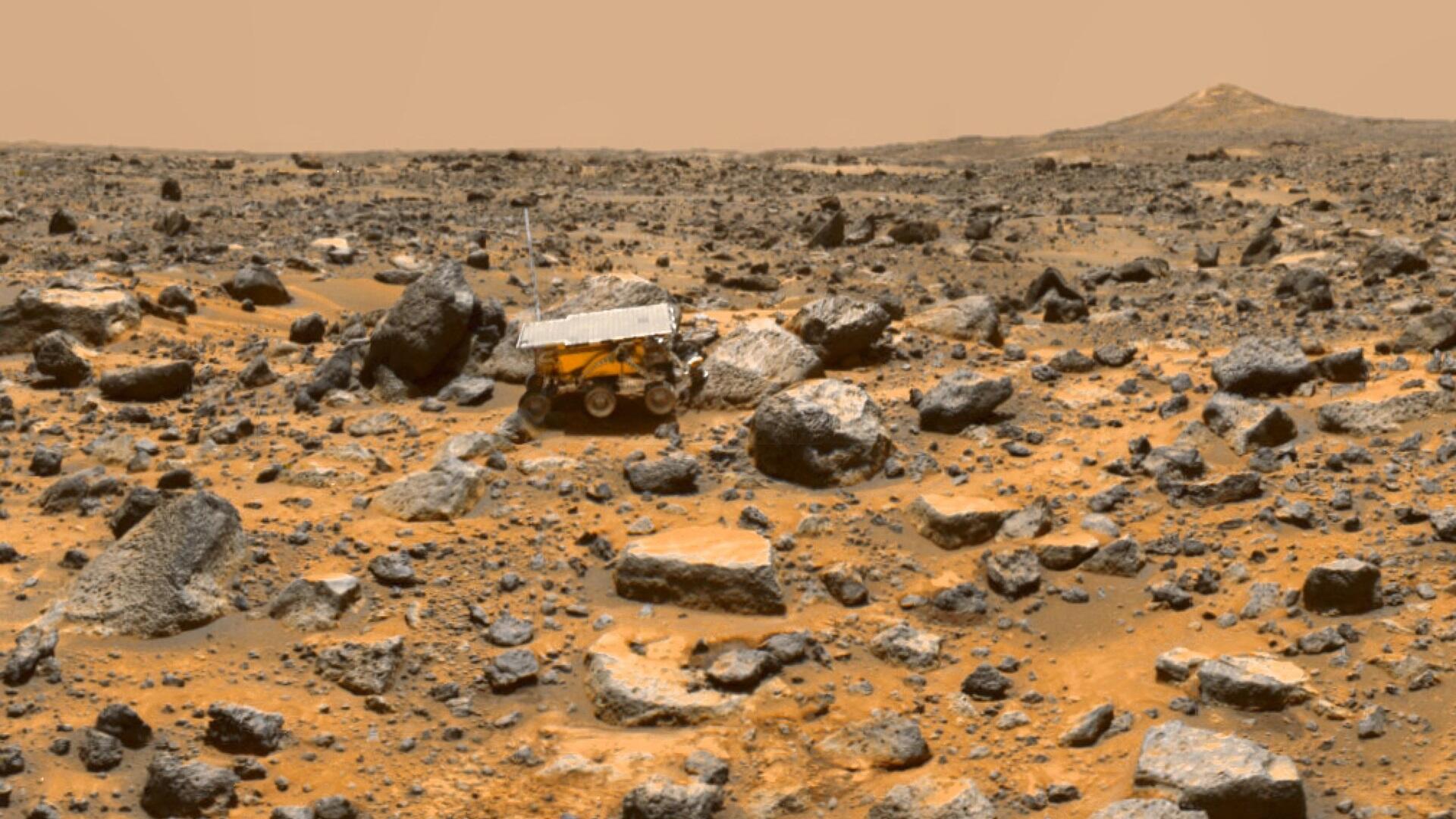
Sojourner Rover
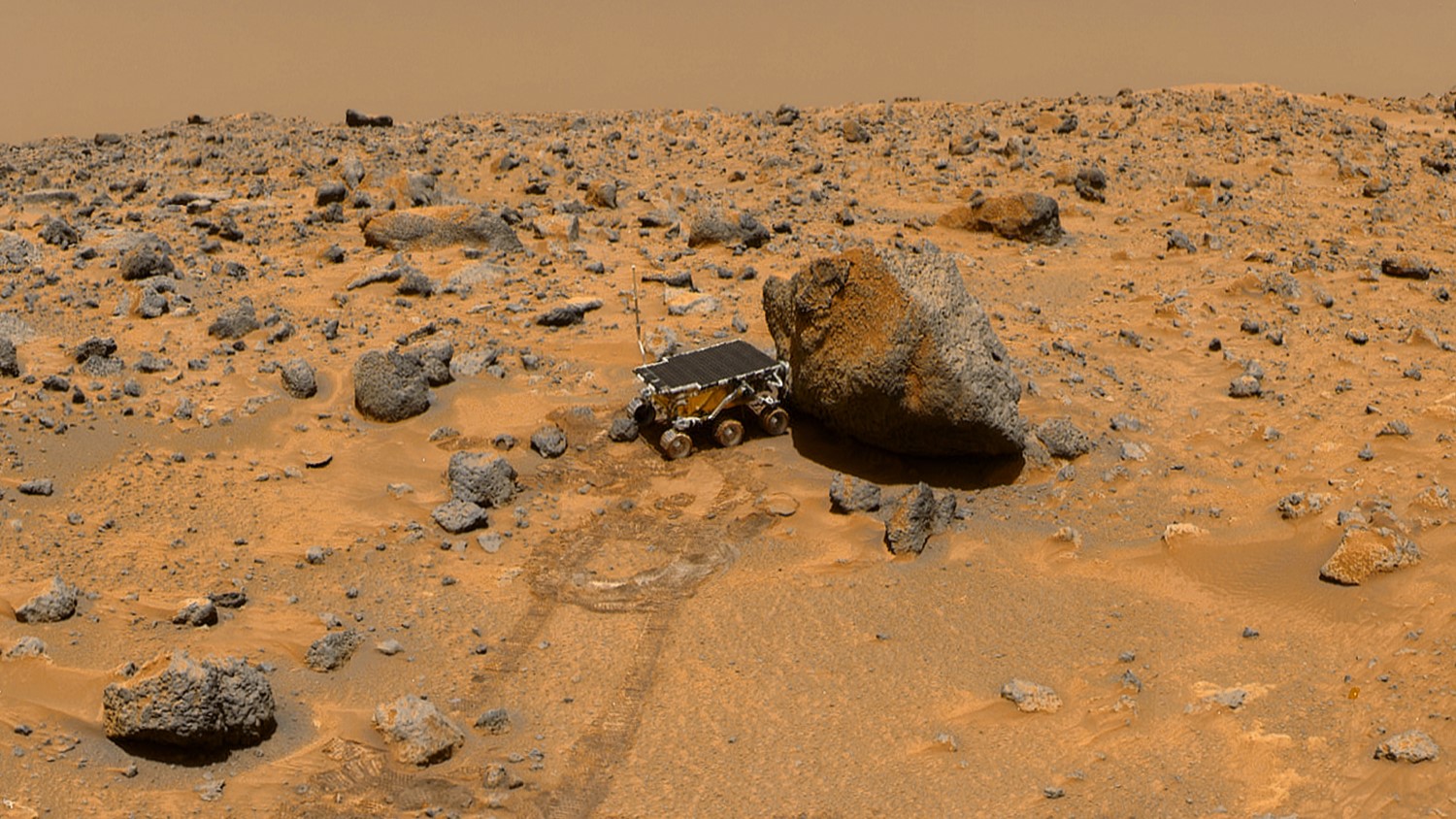
Mars Pathfinder Mission Projesi ile gönderilen Sojourner Rover, 4 Temmuz 1997’de Mars’a ulaştı. Pathfinder’ın Ares Vallis iniş sitesinin bu panoramik görünümü, Sojourner Rover’ı uzaktan gösteriyor. Mars Pathfinder Mission, son başarılı veri iletim döngüsünü 27 Eylül 1997’de EDT saat 6: 23’te tamamladı.
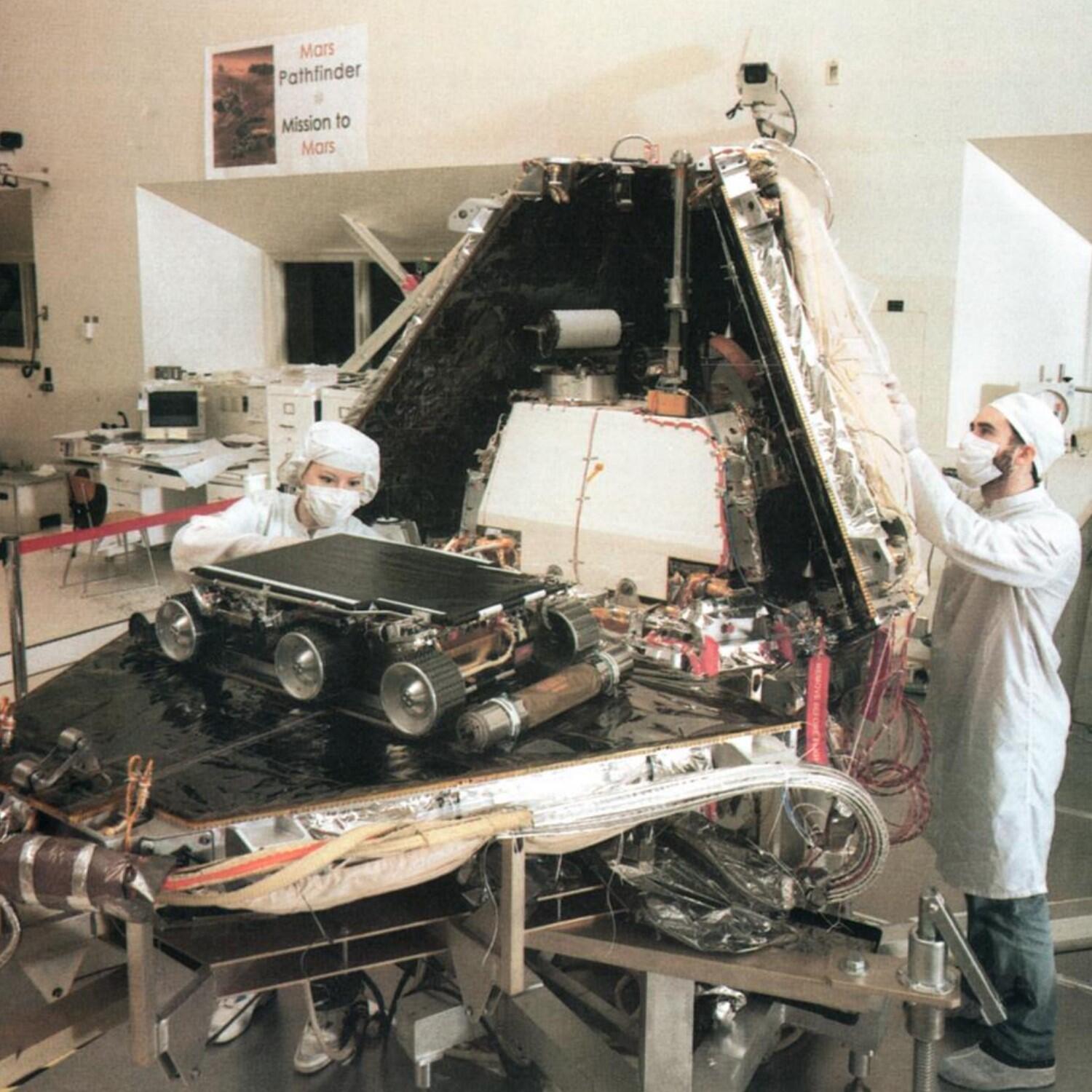
Bilim İnsanlarının Pathfinder Lander’a Sojourner Rover’ı yerleştirme aşamasında çekilen bir fotoğraf karesi.
Sojourner, 4 Temmuz 1997’de Oxia Palus dörtgeninin Chryse Planitia bölgesinde bulunan Ares Vallis kanalına inen robotik bir Mars keşif aracıydı ve 95 Dünya günü boyunca işlevsel kalabilmişti.
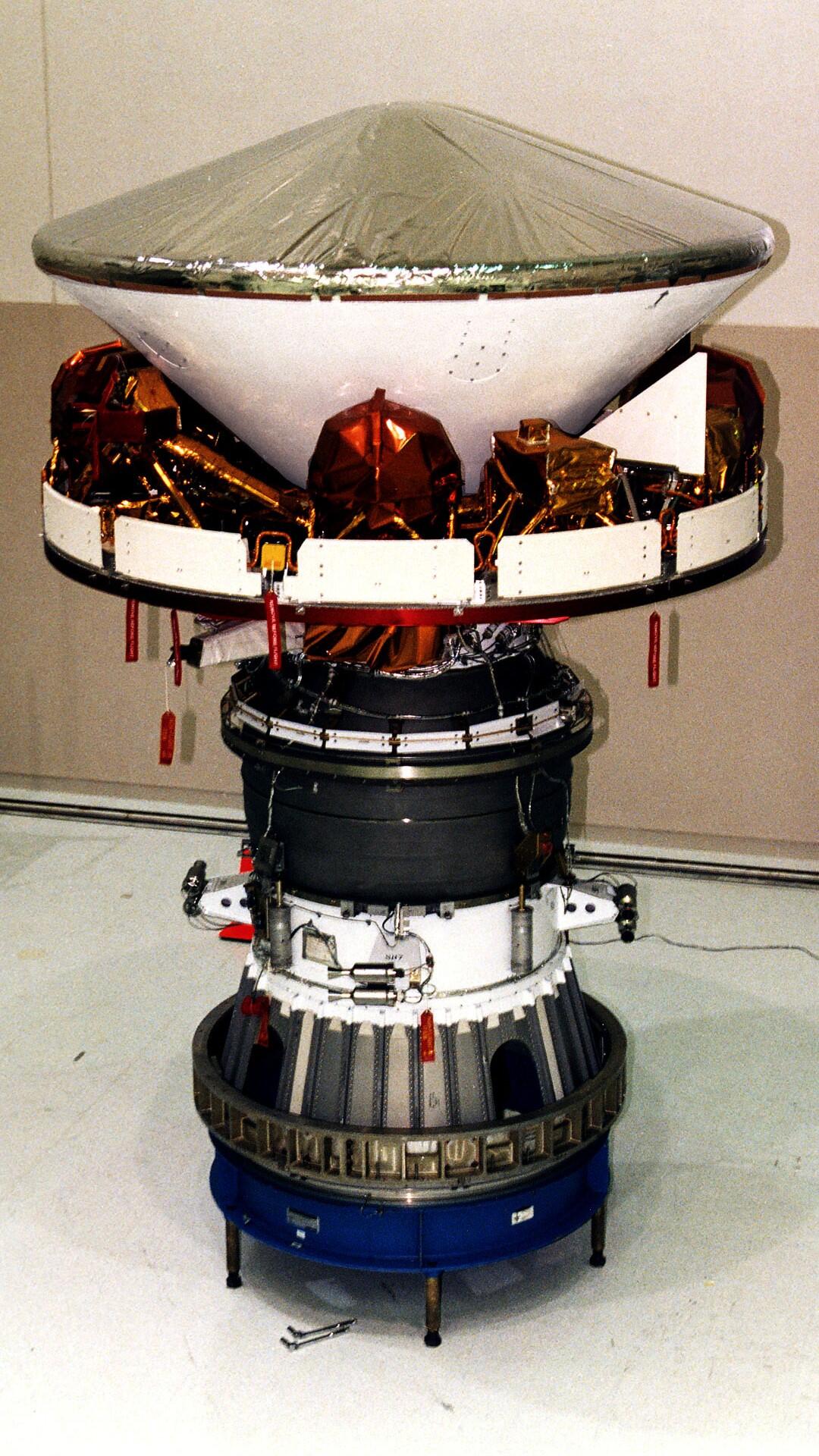
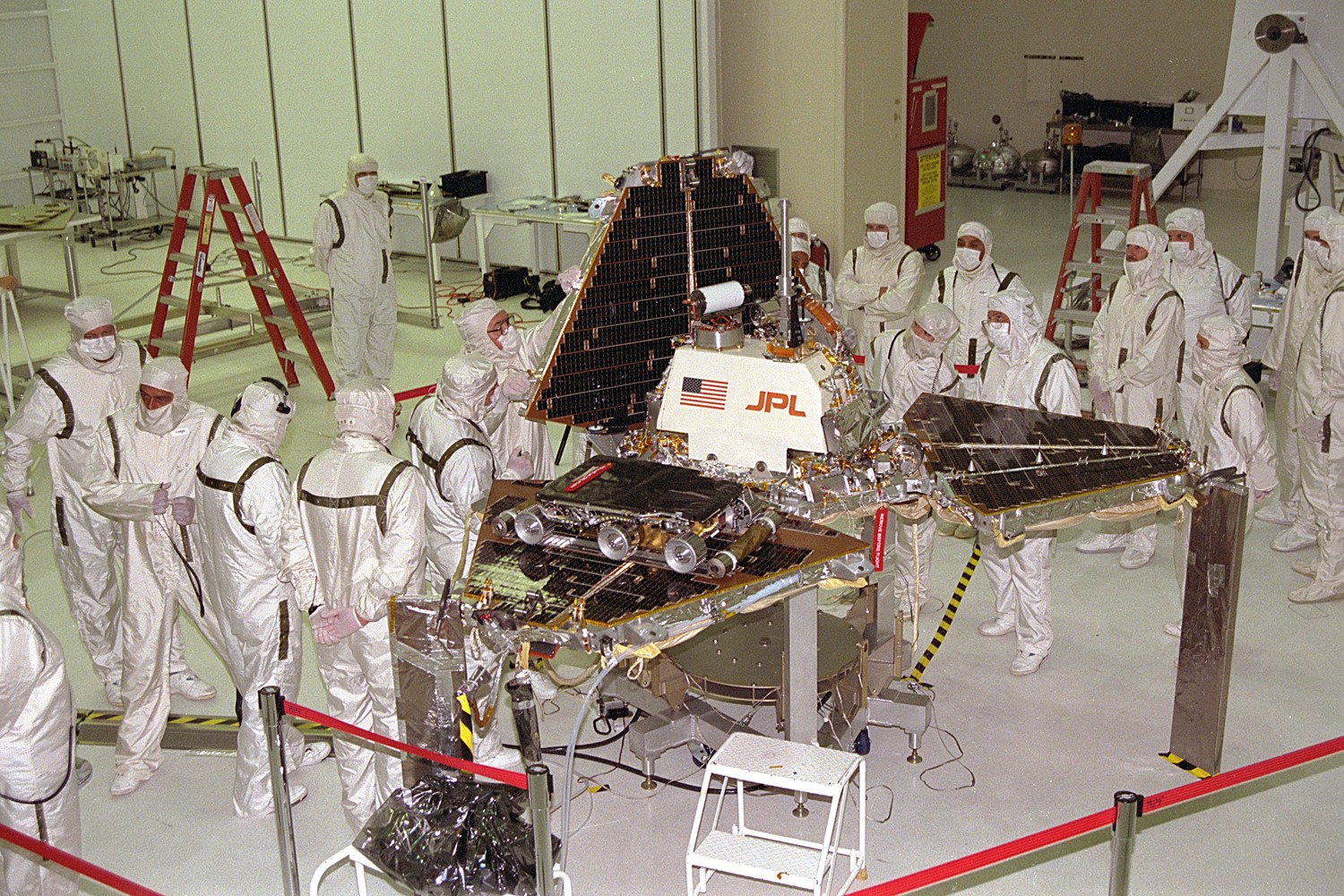
Aeroshell ve Cruise Ring ve Solid Roket Engine, son montaj sırasında Mars Pathfinder.
Dünya dışında başka bir gezegende dolaşan ilk tekerlekli araç olma ünvanına sahip olan Sojourner, Mars Pathfinder görevinin önemli bir parçasını oluşturdu.

Cape Canaveral Hava İstasyonundaki Fırlatma Kompleksi 17B’deki görevliler, uçuş için koruyucu bir yük kaplamasının içine kapatılmadan önce Mars Pathfinder’ı son bir kez kontrol ediyorlar. Pathfinder ve PAM-D üst kademe güçlendiricisi, uzay aracını yörüngeye itecek olan Delta II harcanabilir fırlatma aracının üzerine yerleştirilmiştir.
Mars Pathfinder Lander, 1976’daki Viking misyonundan bu yana kızıl gezegenin yüzeyine inen ilk (Lander sabit olan Rover ise hareketli olan) uzay aracıydı.
4 Aralık 1996’da fırlatıldı, 4 Temmuz 1997’de Mars’a ulaşan uzay aracı, gezegenin ince atmosferine girdi ve yavaşladı sonra paraşütle serbest bırakıldı, ardından roketlerle konuşlandırıldı, ardından da şişmiş hava yastıklarına sarılıp zemine çarparak yere indi.
Yüzeye çıktıktan sonra, koruyucu hava kabuğu üç düz platform ve rampa oluşturacak şekilde açıldı; bunlardan birinde bir gezici araç (Sojourner) bulunuyordu.
Sojourner gezgini rampalardan birinden aşağı indi ve öndeki iki siyah beyaz kamerayı ve arkadaki renkli kamerayı kullanarak yüzeyin yakın çekim görüntülerini almaya başladı.
Gezici ayrıca yüzey toprağı ve kayaları hakkında toplu element bileşimi verileri sağlayan, arkaya monte edilmiş bir Alfa Proton X-ışını Spektrometresine de sahipti.
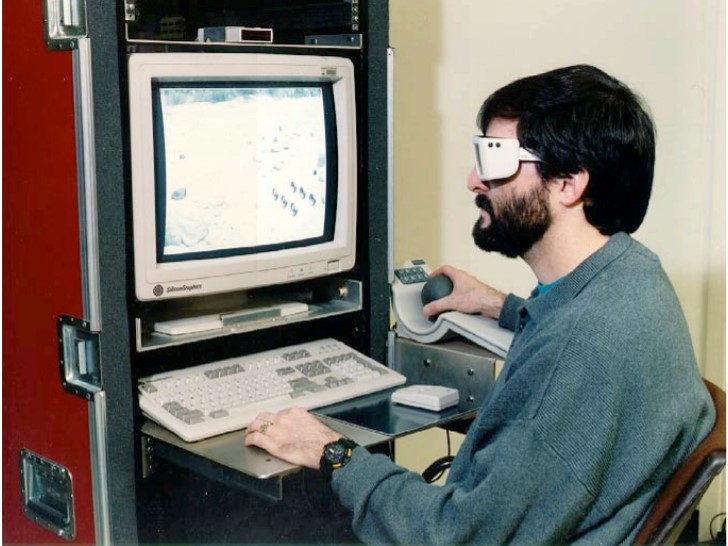
Rover Kontrol Yazılımı: Sojourner operasyonu, Dünya’da Silikon Graphics Onyx2 bilgisayarında çalışan ve komut dizilerinin grafik bir arayüz kullanılarak oluşturulmasına izin veren “Rover Control Software” (RCS) tarafından desteklendi.
Planlama: Rover sürücüsü, baz istasyonundan imgelerle tedarik edilen 3D gözlük takacak ve özel bir joystick ile sanal bir modeli hareket ettirecekti. Rover sürücüleri Brian K. Cooper ve Jack Morrison’dı.
Kontrol yazılımı, gezici ve çevredeki arazinin herhangi bir açıdan görüntülenmesine izin verdi, arazi özelliklerinin incelenmesini, yol noktalarının yerleştirilmesini ve sanal üst geçitleri destekledi.
Dartlar, gezginin nereye gitmesi gerektiğini göstermek için simgeler olarak kullanıldı. İstenen yerler bir diziye eklendi ve performans sergilemek için gezgiye gönderildi. Tipik olarak, günde bir kez uzun bir komut dizisi oluşturuldu ve gönderildi.