Lego Sumo
Lego Sumo Bot, 10 yıl önce erken yaş grupları için daha çok mekanik nitelikler üzerine odaklanan robotik günümüzde üretim teknolojilerinin gelişmesi ve eğitim tekniklerinin daha doğal bir doktrin yaklaşımına yakınsaması yanısıra ihtiyaç ve taleplerin farklılaşması ile birlikte günümüzde oldukça zenginleşmiştir..
Spirit Opportunity
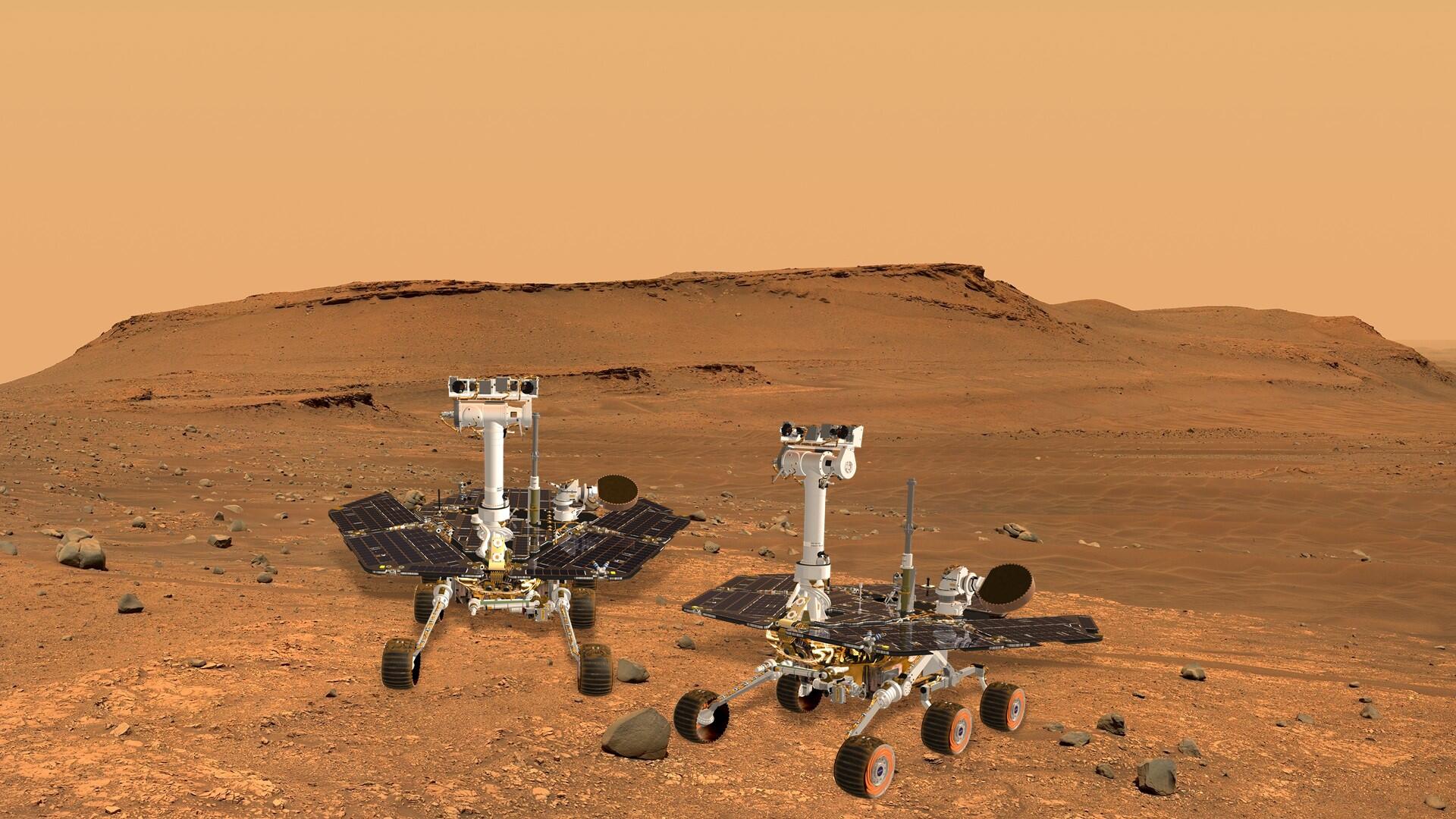
NASA’nın ikiz gezicileri Spirit ve Opportunity, 3 Ocak ve 24 Ocak 2004 PST (4 Ocak ve 25 Ocak UTC) tarihlerinde Mars’a indi. Geziciler, Mars’ın erken dönemlerindeki çevre koşullarına ilişkin jeolojik ipuçları aramak ve bu ortamların yaşama elverişli olup olmadığını değerlendirmek üzere 90 günlük görevler olarak planlandı.
Spirit, orijinal tasarımından 20 kat daha uzun süre dayandı ve görevini 22 Mart 2010’da tamamladı. Opportunity, Mars’ta yaklaşık 15 yıl çalıştı ve kilometre sayacına en fazla kilometre kat ederek sürüş rekorunu kırarak görevini 13 Şubat 2019’da sonlandırdı. .
Spirit, 2004’ten 2010 yılına kadar Mars’ta faaliyet göstermiş olan robotik bir keşif aracıydı. Keşif aracı, 2009 sonlarında pillerinin şarj olmasını engelleyecek bir açıyla bir “kum kapanına” sıkışıp kaldı. Dünya ile son iletişimi ise 22 Mart 2010 tarihinde gerçekleşti.
Opportunity, 2004’ten 2018 yılına kadar Mars’ta faaliyet göstermiş olan robotik bir keşif aracıdır. Opportunity, Mars’taki 2018 gezegensel toz fırtınası nedeniyle 10 Haziran’da iletişimini kesti ve 12 Haziran 2018’de kış uykusuna girdi. Hava açtıktan sonra yeniden başlatılacağı umuluyordu fakat öyle olamadı.
Computer Hardware
Bilgisayar donanımı, kasa, merkezi işlem birimi (CPU), monitör, fare, klavye, bilgisayar veri depolama, grafik kartı, ses kartı, hoparlörler ve anakart gibi bir bilgisayarı oluşturan fiziksel parçaların genel adıdır.
Donanım, genellikle yazılım tarafından herhangi bir komut veya talimatı çalıştırmak üzere CPU ve South – North Chipset ve diğer donanım köprüleri ve iletişim yolları yardımı ile yönlendirilir.
Elektronik sistemlerde kayda değer bir yaklaşımla sadece donanım varken, Bilgisayar Sistemlerinde ise donanım ve yazılım kombinasyonu kullanılabilir bir Bilgi İşlem Sistemi oluşturur.
Spraying Drone
Drone ilaçlama ve sulama tarım sektöründe verimliliği artırmak amacıyla kullanılan bir yöntemdir. Bu yöntem çiftçilerin ilaçlama ve sulama işlemlerini daha hızlı ve verimli bir şekilde yapmalarını sağlar. Ayrıca drone’lar tarım arazilerindeki mahsullerin gelişimini takip ederek çiftçilere daha detaylı raporlama sunabiliyor. Geleneksel ilaçlama yöntemleri genellikle insan emeği ve traktör kullanılarak yapılmakta olup, zaman alıcı ve maliyetlidir.
Marie Curie Rover
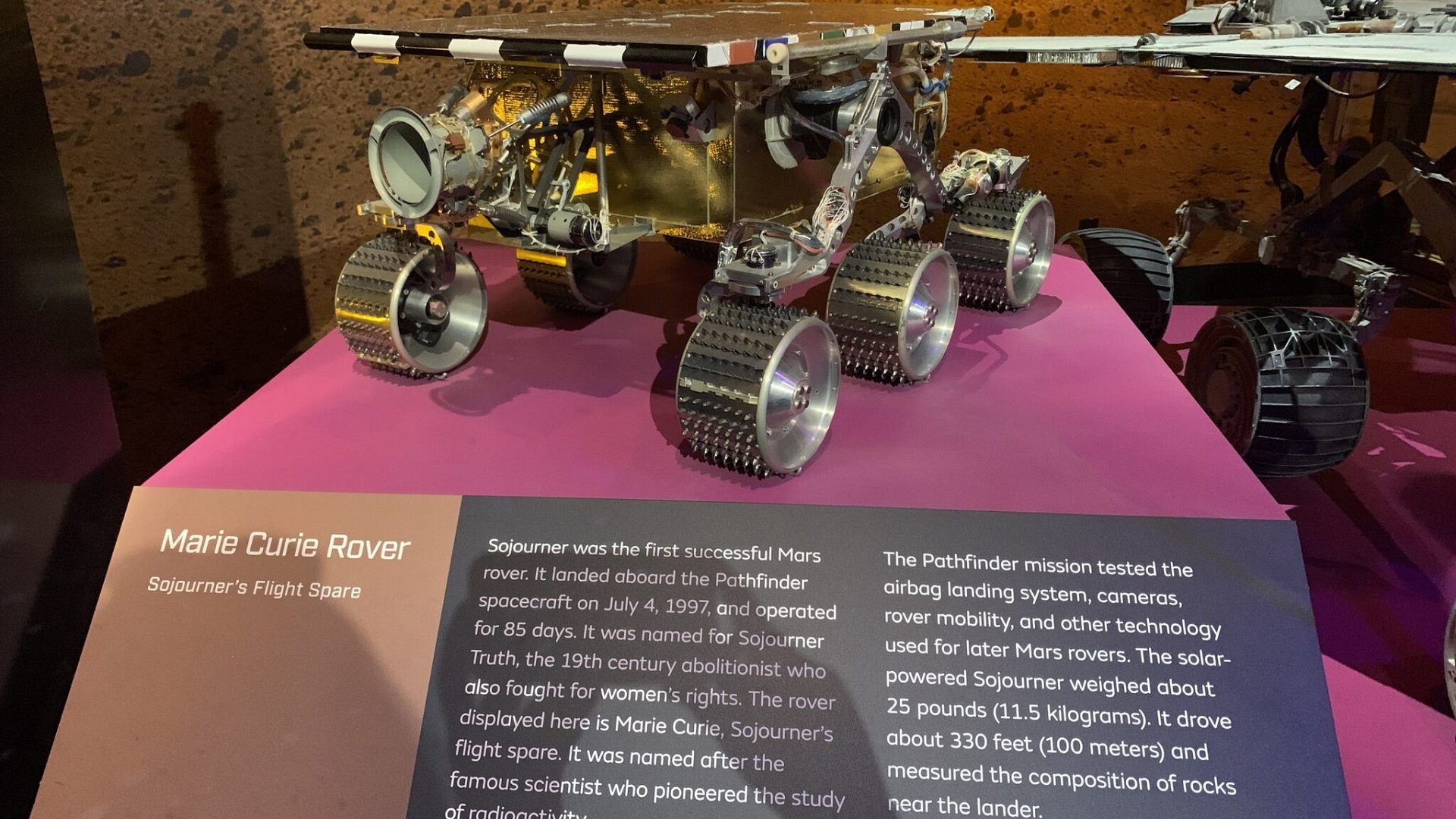
Marie Curie gezicisi, Sojourner gezicisinin uçuş yedeğiydi. Sojourner’ın Mars’taki faaliyetleri sırasında mühendisler, Marie Curie’yi Kaliforniya’daki Jet Propulsion Laboratory’de (JPL) Mars benzeri bir test alanında aynı hareketlerle çalıştırdılar.
NASA bir süre Marie Curie’yi 2001’de Mars misyonuna göndermeyi planladı ancak bu misyon gerçekleştirilmedi.
Bugün bu iki gezici (biri hâlâ Mars’ta ve onun ikizi de dünyada), hareketli bir araçla Mars yüzeyinin ilk başarılı keşfini temsil ediyor, JPL, Marie Curie gezicisini 2015 yılında Müzeye devretti.
Computer System
Bir bilgisayar sisteminin genel olarak 4 bileşeni vardır.
- Donanım (İşlemci (CPU), belek ve I/O üniteleri gibi)
- İşletim Sistemi (Ms-Dos, Unix, OS/2, Linux, Android, iOS, Windows vs gibi)
- Sistem Yazılımları (Derleyiciler, Veritabanı ve Network Yazılımları)
- Uygulama Yazılımları (Kullanıcıların kendi geliştirdikleri yazılımlar)
Modern bir bilgisayar sistemi, bir veya birden fazla işlemci (ya da diğer bir söylemle “CPU”), gerçek bellek (RAM), saatler, terminaller, diskler, bilgisayar ağı (network) birimleri, yazıcı üniteleri, CD sürücüsü, disket ve teyp üniteleri gibi I/O ünitelerinden oluşmaktadır.
Doğal olarak bir bilgisayar sistemi oldukça karmaşık bir yapıdadır.
Autonomous Robot
Otonom robot, insan kontrolüne başvurmadan da hareket edebilen bilgisayar sistemi .
Tarihi örneklemleri arasında uzay gezginleri, modern örneklemleri arasında kendi kendine süpürebilen elektrikli süpürgeler ve kendi kendine gidebilen elektrikli arabalar başlıca uygulama uzayları.
Sojourner Rover
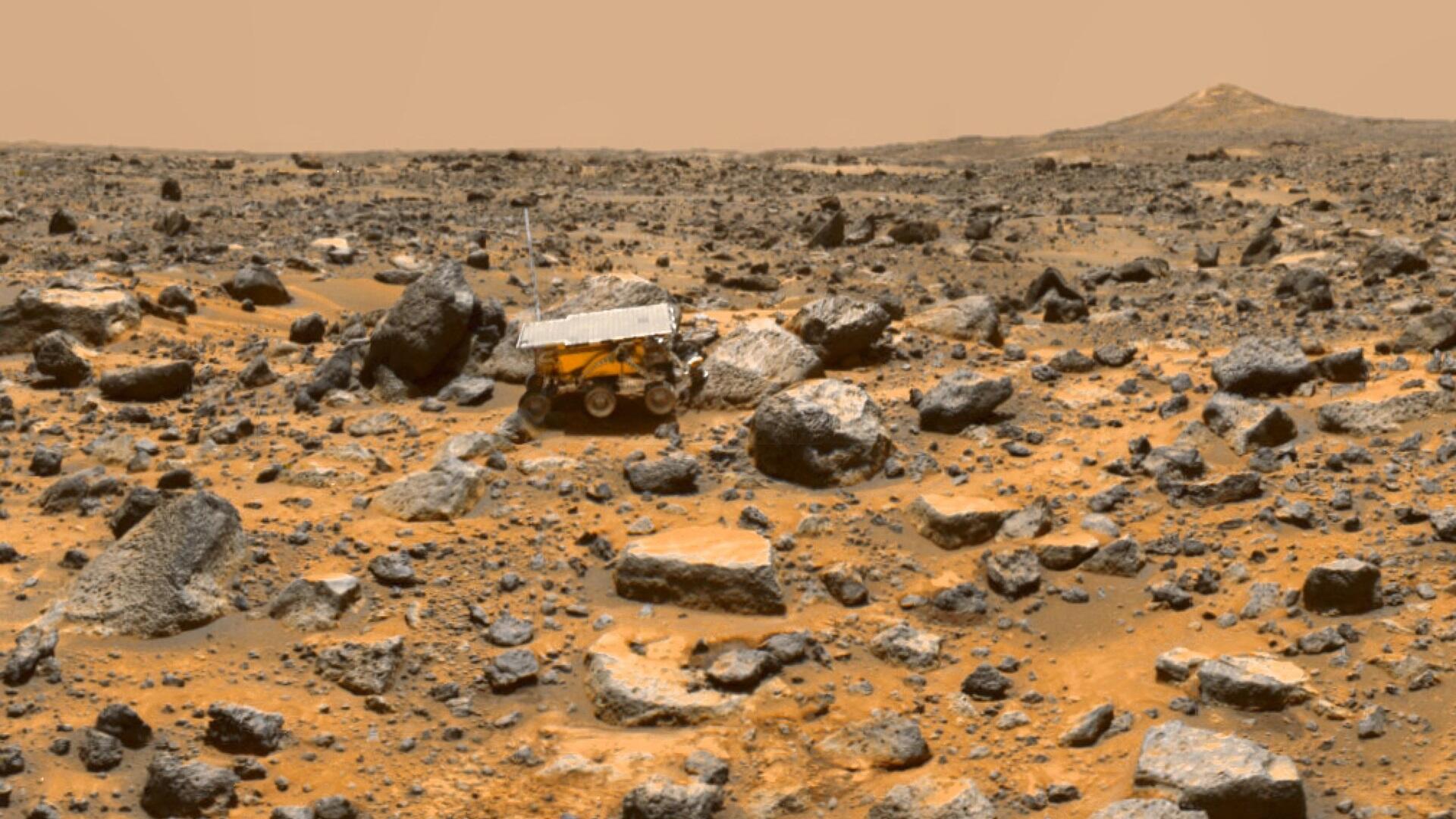
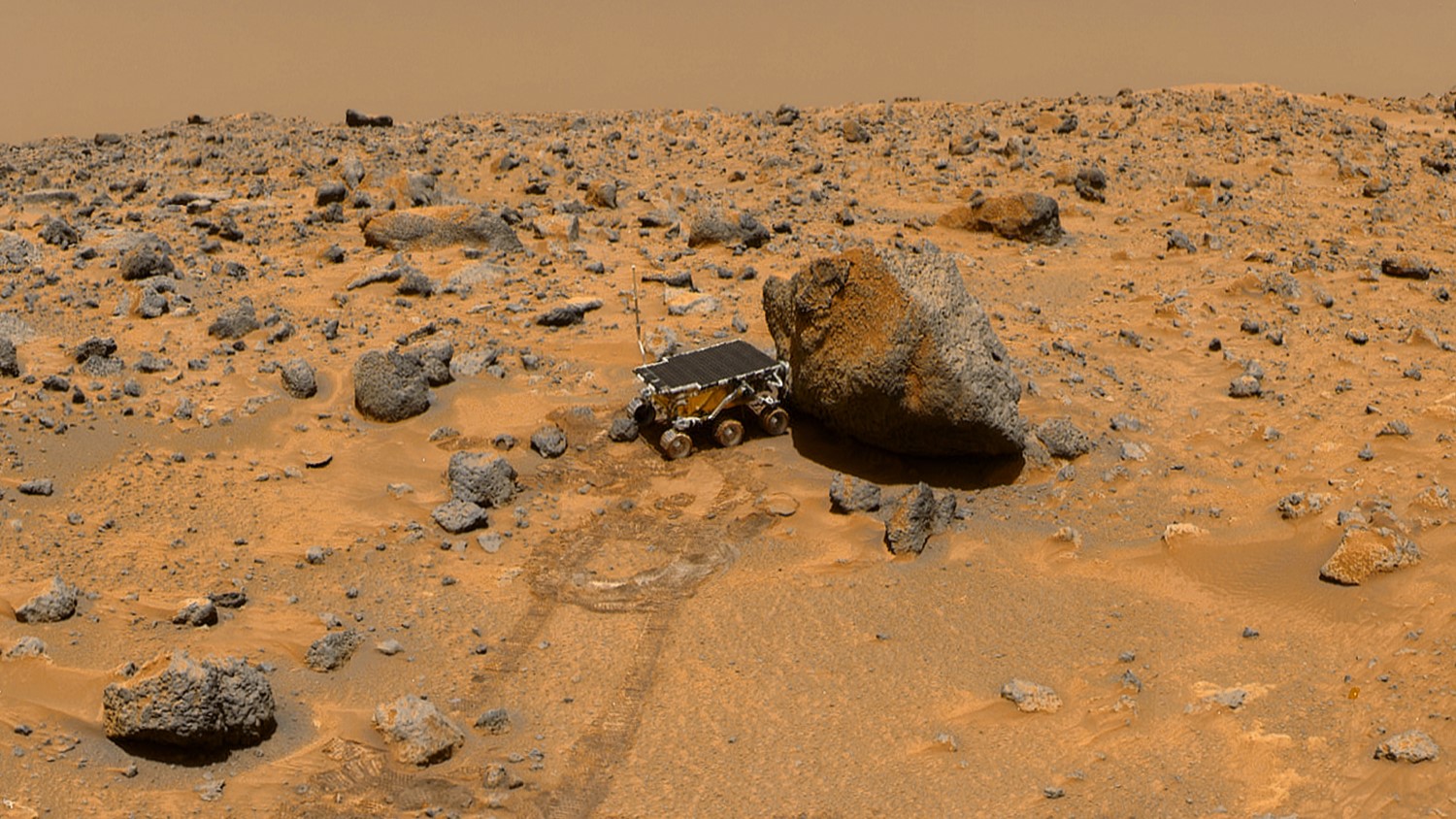
Mars Pathfinder Mission Projesi ile gönderilen Sojourner Rover, 4 Temmuz 1997’de Mars’a ulaştı. Pathfinder’ın Ares Vallis iniş sitesinin bu panoramik görünümü, Sojourner Rover’ı uzaktan gösteriyor. Mars Pathfinder Mission, son başarılı veri iletim döngüsünü 27 Eylül 1997’de EDT saat 6: 23’te tamamladı.
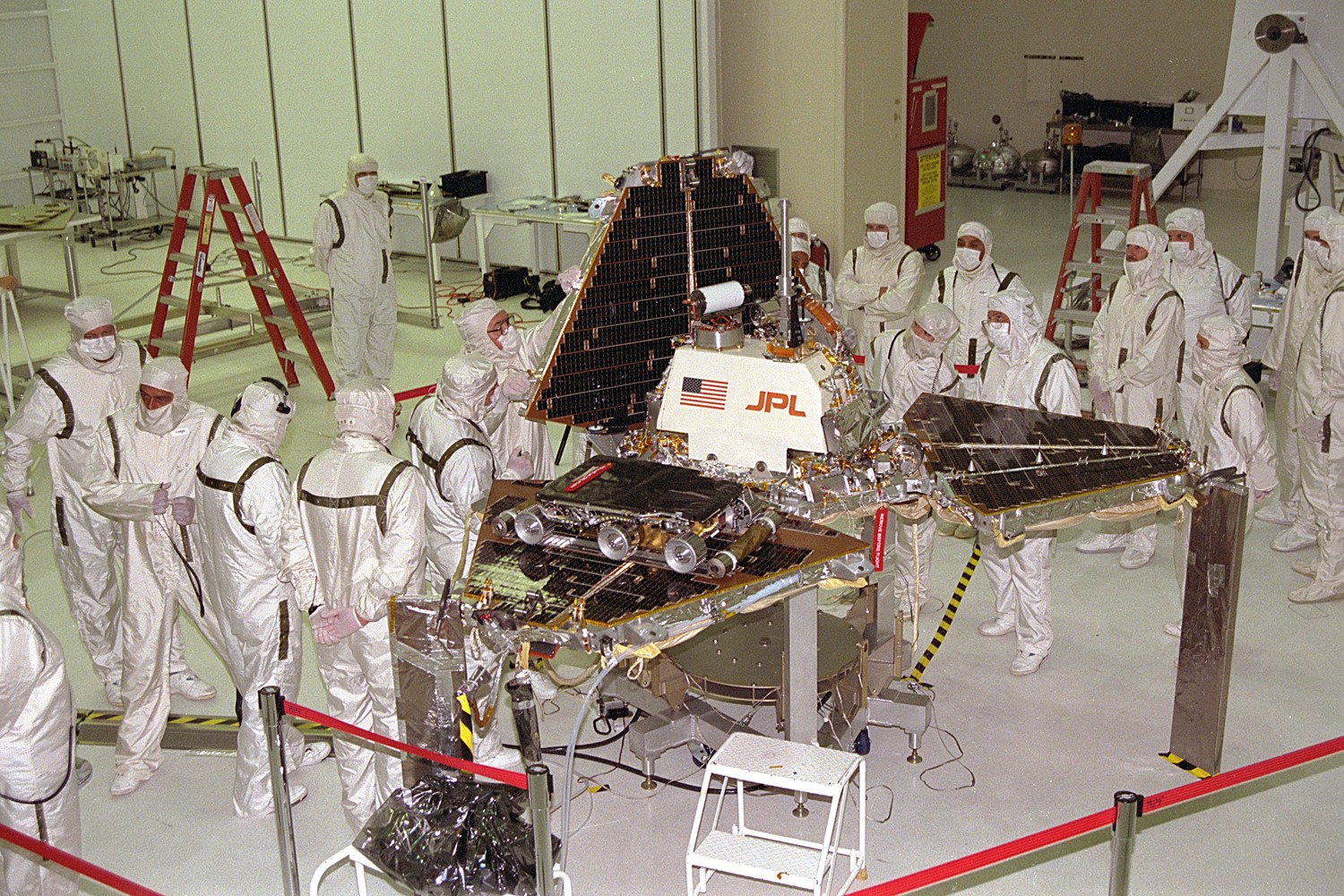
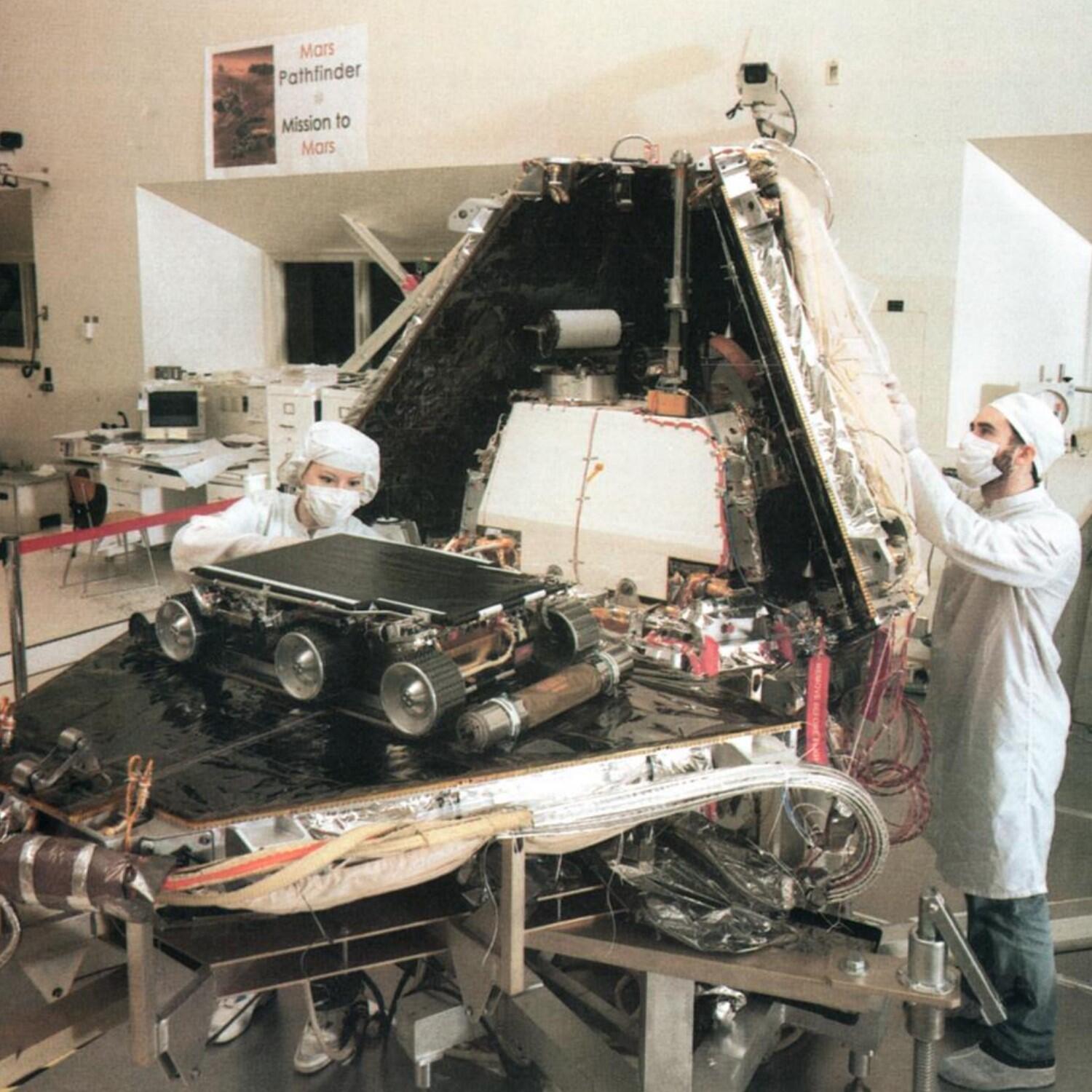
Bilim İnsanlarının Pathfinder Lander’a Sojourner Rover’ı yerleştirme aşamasında çekilen bir fotoğraf karesi.
Sojourner, 4 Temmuz 1997’de Oxia Palus dörtgeninin Chryse Planitia bölgesinde bulunan Ares Vallis kanalına inen robotik bir Mars keşif aracıydı ve 95 Dünya günü boyunca işlevsel kalabilmişti.
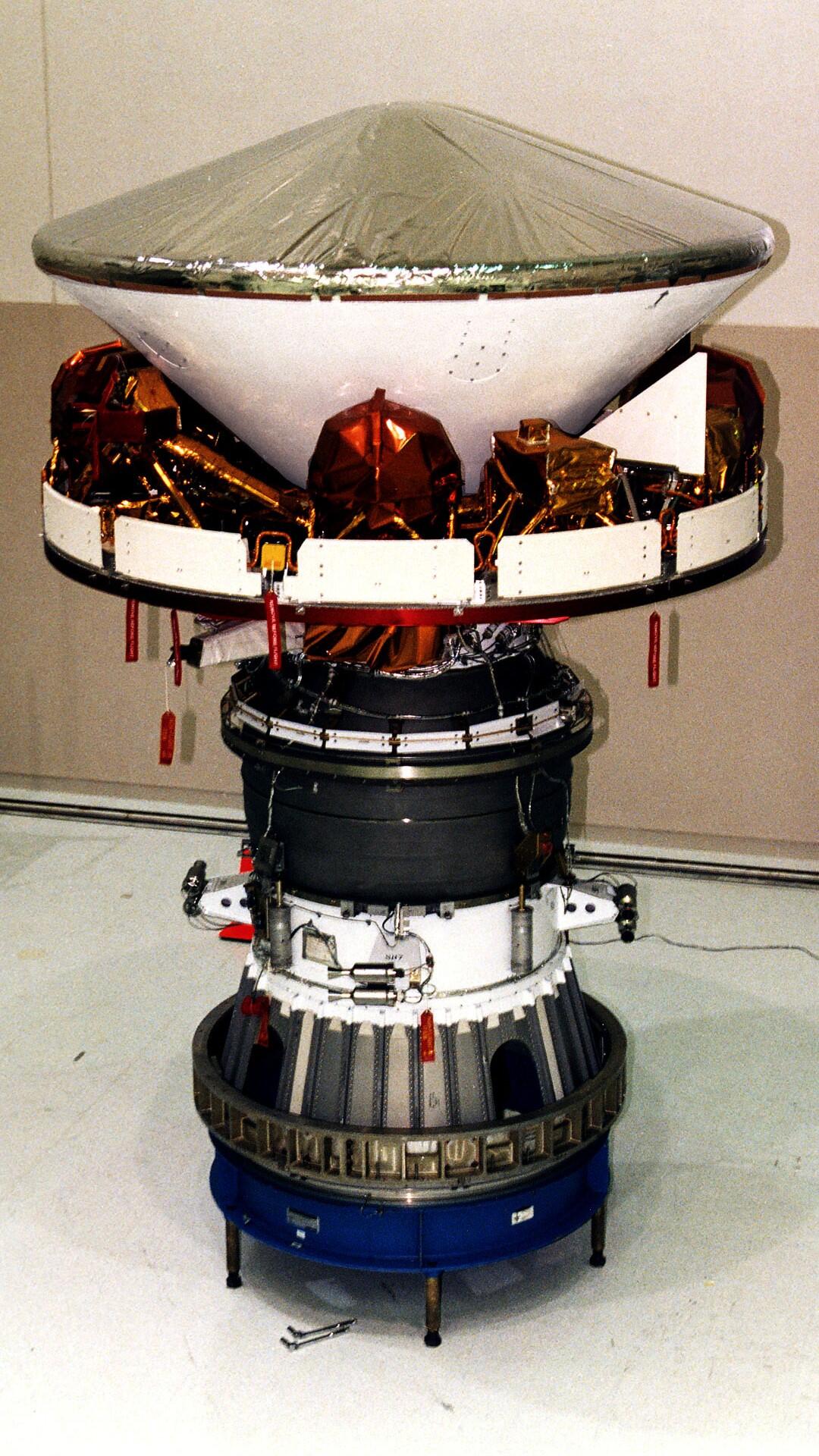
Aeroshell ve Cruise Ring ve Solid Roket Engine, son montaj sırasında Mars Pathfinder.
Dünya dışında başka bir gezegende dolaşan ilk tekerlekli araç olma ünvanına sahip olan Sojourner, Mars Pathfinder görevinin önemli bir parçasını oluşturdu.

Cape Canaveral Hava İstasyonundaki Fırlatma Kompleksi 17B’deki görevliler, uçuş için koruyucu bir yük kaplamasının içine kapatılmadan önce Mars Pathfinder’ı son bir kez kontrol ediyorlar. Pathfinder ve PAM-D üst kademe güçlendiricisi, uzay aracını yörüngeye itecek olan Delta II harcanabilir fırlatma aracının üzerine yerleştirilmiştir.
Mars Pathfinder Lander, 1976’daki Viking misyonundan bu yana kızıl gezegenin yüzeyine inen ilk (Lander sabit olan Rover ise hareketli olan) uzay aracıydı.
4 Aralık 1996’da fırlatıldı, 4 Temmuz 1997’de Mars’a ulaşan uzay aracı, gezegenin ince atmosferine girdi ve yavaşladı sonra paraşütle serbest bırakıldı, ardından roketlerle konuşlandırıldı, ardından da şişmiş hava yastıklarına sarılıp zemine çarparak yere indi.
Yüzeye çıktıktan sonra, koruyucu hava kabuğu üç düz platform ve rampa oluşturacak şekilde açıldı; bunlardan birinde bir gezici araç (Sojourner) bulunuyordu.
Sojourner gezgini rampalardan birinden aşağı indi ve öndeki iki siyah beyaz kamerayı ve arkadaki renkli kamerayı kullanarak yüzeyin yakın çekim görüntülerini almaya başladı.
Gezici ayrıca yüzey toprağı ve kayaları hakkında toplu element bileşimi verileri sağlayan, arkaya monte edilmiş bir Alfa Proton X-ışını Spektrometresine de sahipti.
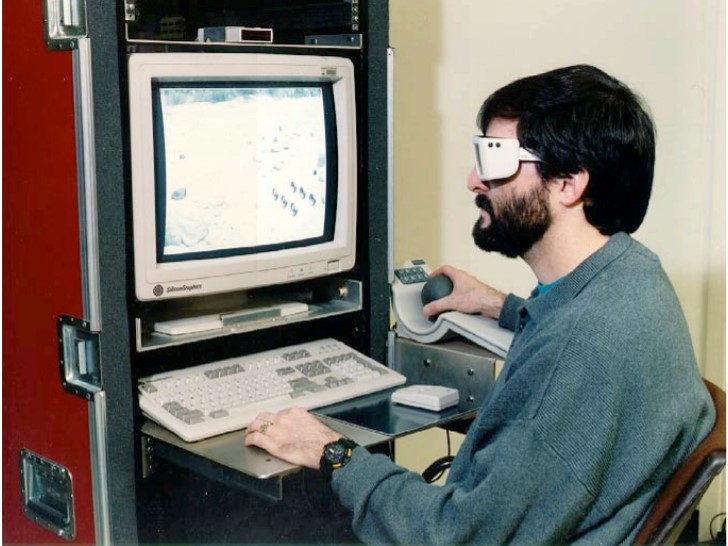
Rover Kontrol Yazılımı: Sojourner operasyonu, Dünya’da Silikon Graphics Onyx2 bilgisayarında çalışan ve komut dizilerinin grafik bir arayüz kullanılarak oluşturulmasına izin veren “Rover Control Software” (RCS) tarafından desteklendi.
Planlama: Rover sürücüsü, baz istasyonundan imgelerle tedarik edilen 3D gözlük takacak ve özel bir joystick ile sanal bir modeli hareket ettirecekti. Rover sürücüleri Brian K. Cooper ve Jack Morrison’dı.
Kontrol yazılımı, gezici ve çevredeki arazinin herhangi bir açıdan görüntülenmesine izin verdi, arazi özelliklerinin incelenmesini, yol noktalarının yerleştirilmesini ve sanal üst geçitleri destekledi.
Dartlar, gezginin nereye gitmesi gerektiğini göstermek için simgeler olarak kullanıldı. İstenen yerler bir diziye eklendi ve performans sergilemek için gezgiye gönderildi. Tipik olarak, günde bir kez uzun bir komut dizisi oluşturuldu ve gönderildi.