

Ingenuity Drone
Perseverance, NASA’nın Mars 2020 görevinin bir parçası olarak Mars’taki Jezero kraterini keşfetmek amacıyla tasarlanmış otomobil büyüklüğünde bir Mars keşif aracıdır.
Jet İtki Laboratuvarı tarafından üretildi ve 30 Temmuz 2020 11:50 UTC’de fırlatıldı. Keşif aracının Mars’a başarıyla indiğine dair onay 18 Şubat 2021 20:55 UTC’de alındı.
Perseverance, 28 Mayıs 2024 itibarıyla, inişinden bu yana 1.195 Dünya günü veya 3 yıl, 3 ay, 9 gün boyunca Mars’ta aktif durumda.
Keşif aracının varışının ardından NASA, iniş bölgesini Octavia E. Butler İniş Alanı olarak adlandırdı.,
Mars 2020 Misyonu; NASA’nın Mars Keşif Programı’nın önemli bir parçasını oluşturan ve yüksek teknoloji ürünü robotik otonom keşif aracı Perseverance ile küçük robotik müşterek eksenli helikopter Ingenuity ve ilgili teslimat araçlarını içeren komple bir Mars keşif aracı görevidir.
Mars Keşif Programı (Mars Exploration Program), NASA tarafından finanse edilen ve yönetilen Mars gezegeninin araştırılması amacıyla başlatılmış uzun vadeli bir girişimdir.
1993 yılında oluşturulan program, Mars’da yaşam olasılıklarının yanı sıra, gezegenin iklimini ve doğal kaynaklarını keşfetmek için yörünge araçları, iniş araçları ve Mars keşif araçlarından yararlandı.
NASA’nın 2013 mali yılı bütçesindeki % 40’lık kesinti nedeniyle programı yeniden formüle etmek için teknoloji, bilim ve insanlı görevlerin amirlerini bir araya getiren Mars Programı Planlama Grubu (MPPG) kuruldu.
Ingenuity , Mars 2020 misyonunun bir parçası olarak 2021’den 2024’e kadar Mars’ta görev yapan otonom bir NASA helikopteridir. İlk uçuşunu 19 Nisan 2021’de gerçekleştiren Ingenuity, Mars’ın son derece sığ atmosferinde uçuşun mümkün olduğunu göstererek, motorlu ve kontrollü dünya dışı uçuş gerçekleştiren ilk hava aracı oldu.
NASA’nın Jet Propulsion Laboratory (JPL) tarafından AeroVironment, NASA’nın Ames Araştırma Merkezi ve Langley Araştırma Merkezi ile işbirliği içinde ve bazı bileşenleri Lockheed Martin Space, Qualcomm ve SolAero tarafından tedarik edilerek tasarlandı.
Arizona Eyalet Üniversitesi, kameraların tasarımı, üretimi, test edilmesi ve çalıştırılması konusunda San Diego’daki Malin Uzay Bilim Sistemleri ile işbirliği içinde ve Üniversitenin Niels Bohr Enstitüsü ile işbirliği içinde çalışarak Mastcam-Z cihazının operasyonlarını yönetmektedir. Kalibrasyon hedeflerinin tasarımı, üretimi ve test edilmesi konusunda Kopenhag.
Ingenuity, 45 km genişliğindeki Jezero kraterinin batı kenarı yakınındaki Octavia E. Butler Landing’e inen Perseverance gezgininin alt tarafına eklenerek 18 Şubat 2021’de Mars’a indirildi.
Radyo sinyallerinin Dünya ile Mars arasında seyahat etmesi, gezegenlerin konumlarına bağlı olarak 5 ila 20 dakika arasında sürdüğü için, doğrudan gerçek zamanlı olarak kontrol edilemiyordu, ancak JPL tarafından tasarlanıp kendisine gönderilen uçuş planlarını uygulamak için otonom olarak uçmayı başardı.
Mars’ın yerçekimi Dünya’nın 1/3 oranında daha düşük olmasına rağmen atmosferi yalnızca %1 kadar yoğun, bu da helikopterin yerden kalkma görevini çok daha zorlaştırıyordu.
Mayıs 2016’da, prototip Mars helikopteri, simüle edilmiş Mars atmosferik koşullarında ilk motorlu, kontrollü serbest uçuşu gerçekleştirdi, prototip şu anda Müze koleksiyonunda.
Test, NASA’nın Jet Propulsion Laboratuvarı’nın Uzay Simülatörü’nde, Mars’ta bulunana benzer şekilde boşaltılmış ve ince bir karbondioksit atmosferiyle doldurulmuş 25 metre genişliğinde bir vakum odası içinde gerçekleştirildi.
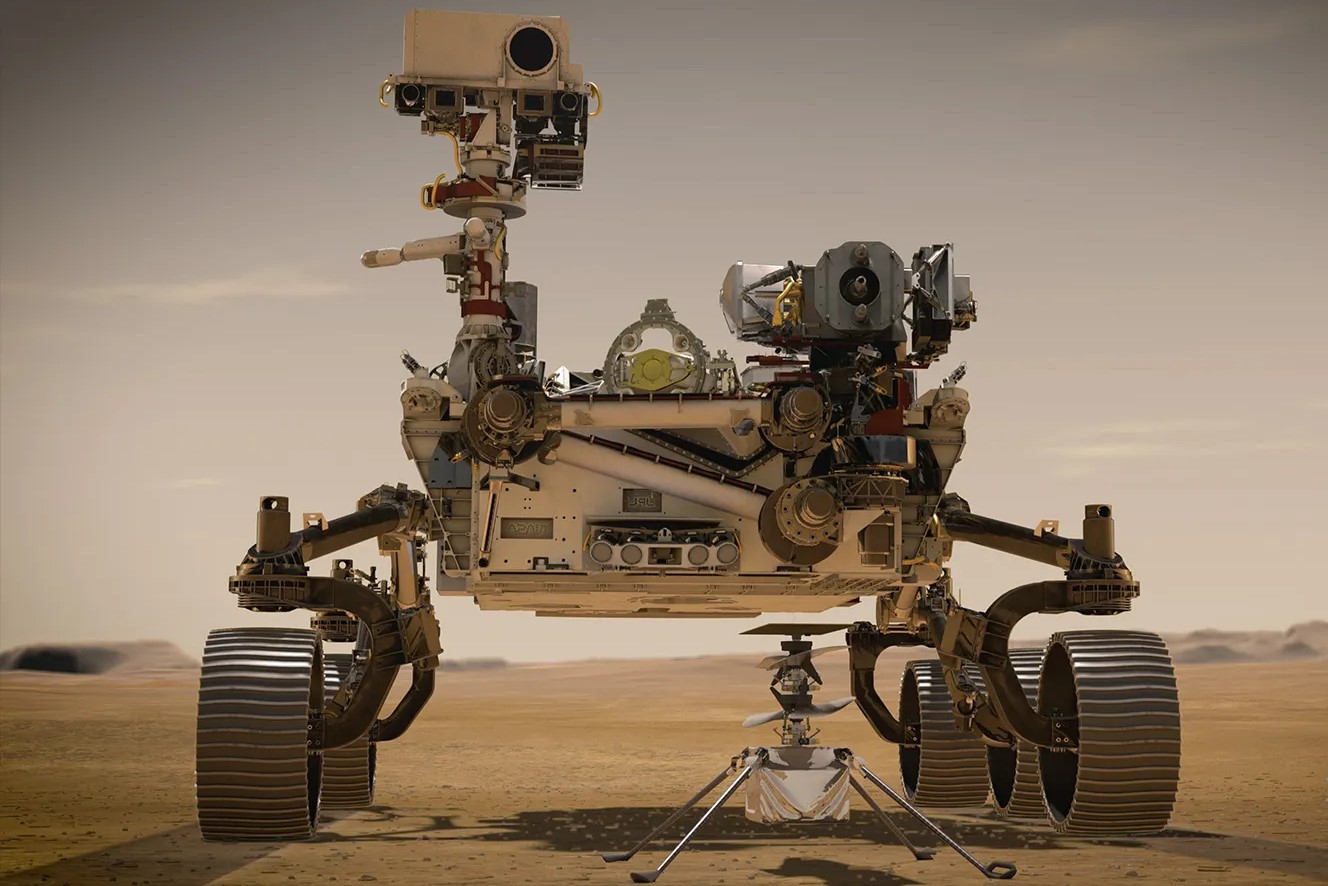
NASA’nın gezicileri Perseverance Rover ve Ingenuity Helicopter..
Jezero Krateri 45 kilometre genişliğindedir ve Mars ekvatorunun hemen kuzeyinde yer alan Isidis Planitia adı verilen düz bir ovanın batı kenarında yer almaktadır.
İniş alanı, bir önceki Mars Gezicisi olan Curiosity’nin Gale Krateri’ndeki iniş alanından yaklaşık 3.700 kilometre uzaklıktadır. Perseverance, önceki keşif aracı Curiosity’yle benzer bir tasarıma sahip, fakat orta düzeyde daha fazla geliştirilmiştir, 7 birincil faydalı yük cihazı, 19 kamera ve 2 mikrofon taşımaktadır.
Mars’a inen son gezici Perseverance , antik gölün neye benzediğini ve Mars’taki olası biyolojik imzaların olup olmadığını ve kimyasal perspektiften ne tür cevherler olduğunu belirlemek için antik göl ve delta yataklarını araştırıyor.
Ingenuity Mars Helikopteri, projeyi NASA Genel Merkezi için yöneten NASA’nın Jet Propulsion Laboratuvarı tarafından inşa edilmiş ve NASA’nın Bilim Misyonu Direktörlüğü tarafından desteklenmiştir.
NASA’nın Kaliforniya Silikon Vadisi’ndeki Ames Araştırma Merkezi ve NASA’nın Hampton, Virginia’daki Langley Araştırma Merkezi, Ingenuity’nin geliştirilmesi sırasında önemli uçuş performansı analizi ve teknik yardım sağladı.
AeroVironment Inc., Qualcomm ve SolAero ayrıca tasarım desteği ve ana araç bileşenleri de sağladı ayrıca Lockheed Martin Space, Mars Helikopter Teslimat Sistemini tasarladı ve üretti.
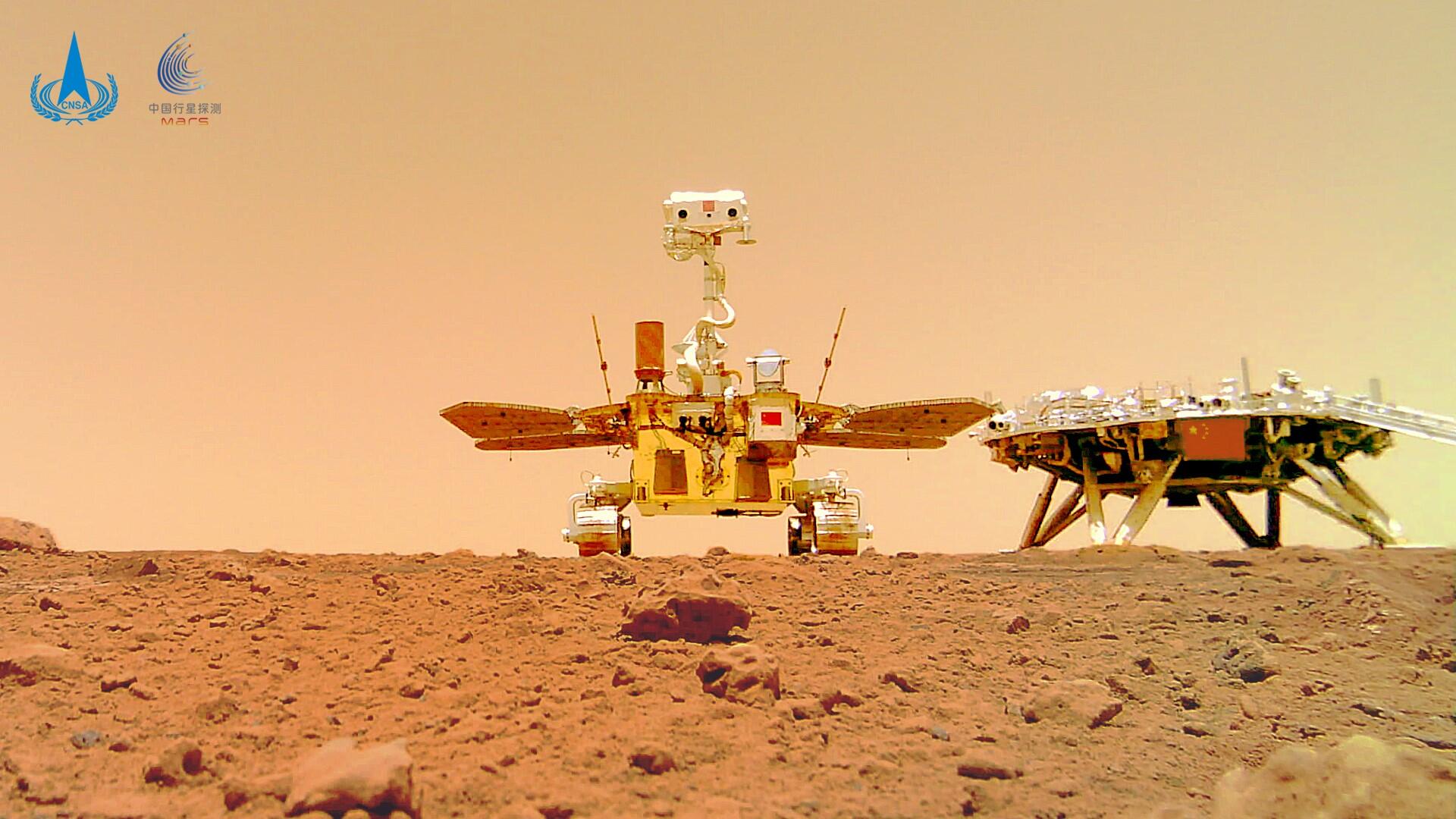
Zhurong Rover
Zhurong, Çin’in başka bir gezegene indirdiği ilk Mars keşif aracıdır (daha önce Ay’a keşif aracı indirmişti), Çin Ulusal Uzay İdaresi (CNSA) tarafından yürütülen Tianwen-1 Mars görevinin bir parçasıdır.
Uzay aracı 23 Temmuz 2020’de fırlatıldı ve 10 Şubat 2021’de Mars yörüngesine yerleştirildi. Keşif aracını taşıyan iniş aracı, 14 Mayıs 2021’de Mars’a başarılı bir yumuşak iniş gerçekleştirdi ve Çin’i, ABD’den sonra Mars’a bir uzay aracını yumuşak bir şekilde başarıyla indiren ve yüzeyden iletişim kuran ikinci ülke haline getirdi.
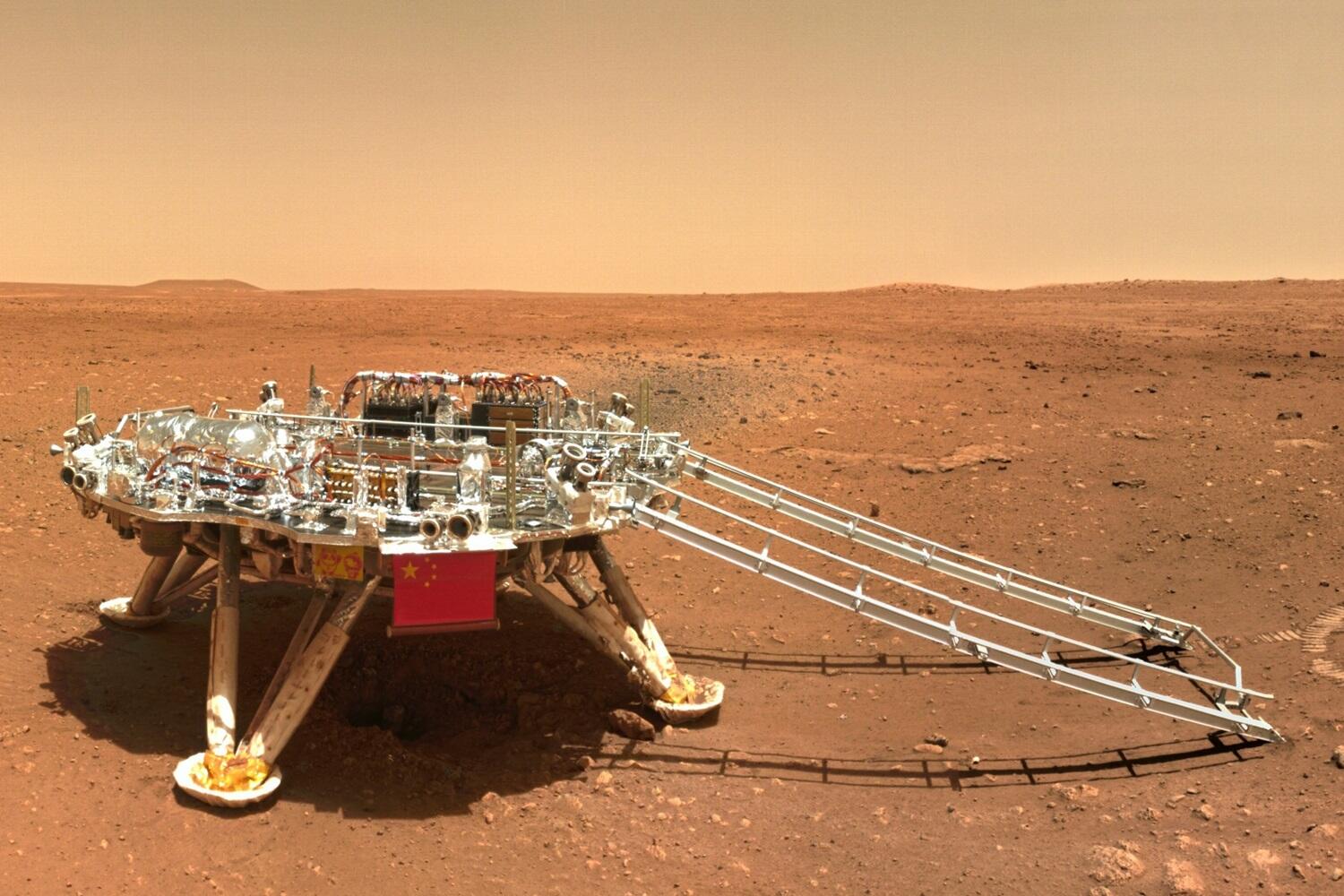
Zhurong Landing Platform
Zhurong, 22 Mayıs 2021 02:40 UTC’de başarıyla konuşlandırıldı, 93 Dünya günü ömür için tasarlanmış olan Zhurong, Mars yüzeyine konuşlandırıldıktan sonra 356,5 gün boyunca aktif kaldı.
Keşif aracı, yaklaşan kum fırtınaları ve Mars kışı nedeniyle 20 Mayıs 2022’de pasif hale geldi ve uygun sıcaklık ve güneş ışığı koşullarıyla kendi kendine uyanmayı bekledi.
Keşif aracının Mars’ın kuzey yarımküresinde kış mevsiminin sona erdiği ve güneş ışığının arttığı Aralık 2022’de uyanması bekleniyordu, fakat bu gerçekleşmedi. NASA görüntüleri, keşif aracının uyku dönemine girdiği neredeyse bir yıl önceki konumda olduğunu gösterdi.
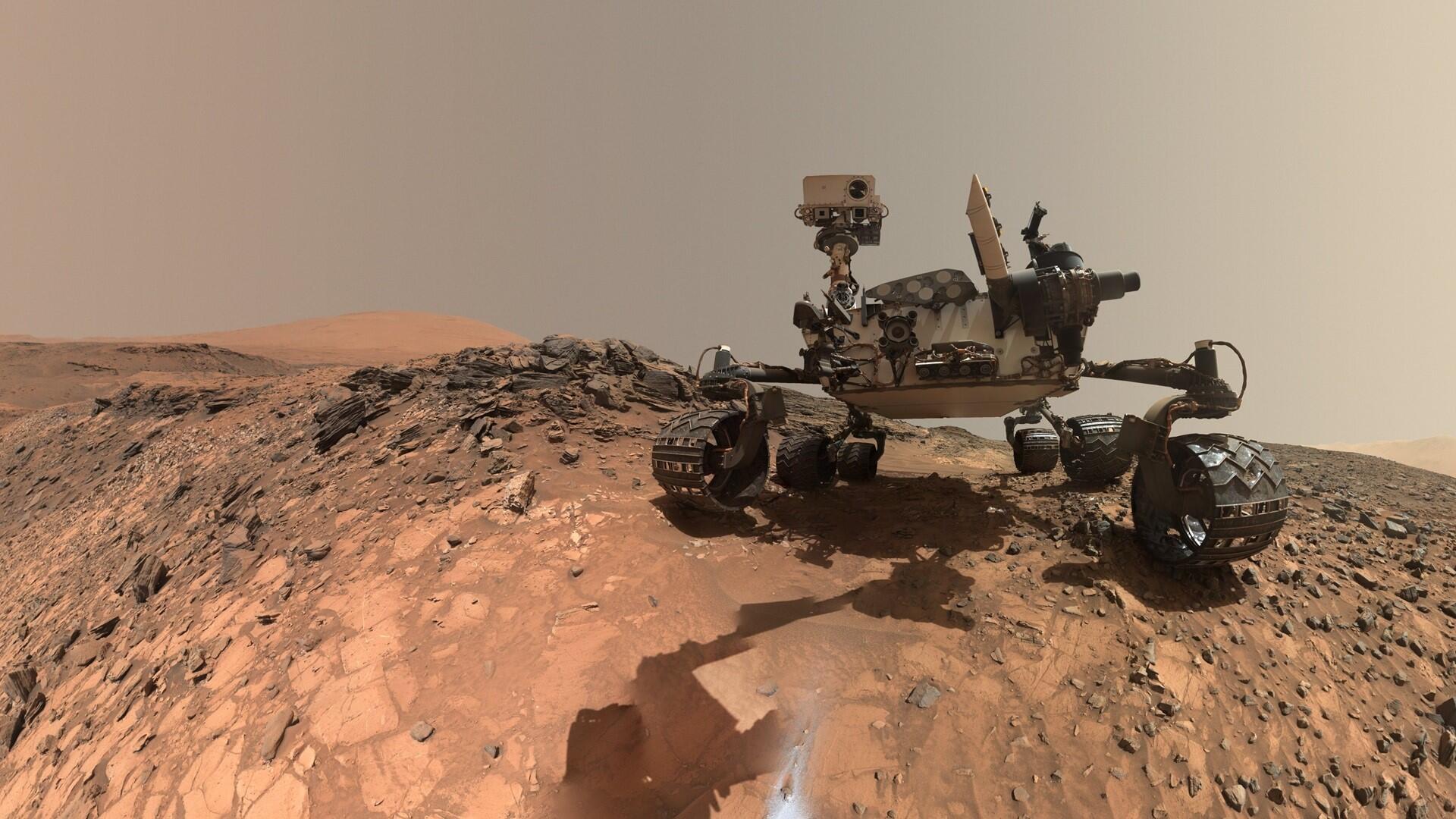
Curiosity Rover
Curiosity, NASA’nın Mars Bilim Laboratuvarı (MSL) görevinin bir parçası olarak Mars’taki Gale krateri ve Aeolis Mons’u (Gale kraterinin zirve noktası) araştıran otomobil büyüklüğündeki bir Mars keşif aracı olarak üretildi.
Curiosity, 26 Kasım 2011 15:02:00 UTC’de Cape Canaveral’dan (CCAFS) fırlatıldı ve 6 Ağustos 2012 05:17:57 UTC’de Mars’taki Gale kraterinin içindeki Aeolis Palus’a iniş yaptı.Bradbury iniş alanı, 560 milyon km yolculuğun ardından aracın iniş hedefinin merkezine 2,4 km ‘den daha yakındı.
Pi sayısında virgülden sonra 15. rakamın şeysi..
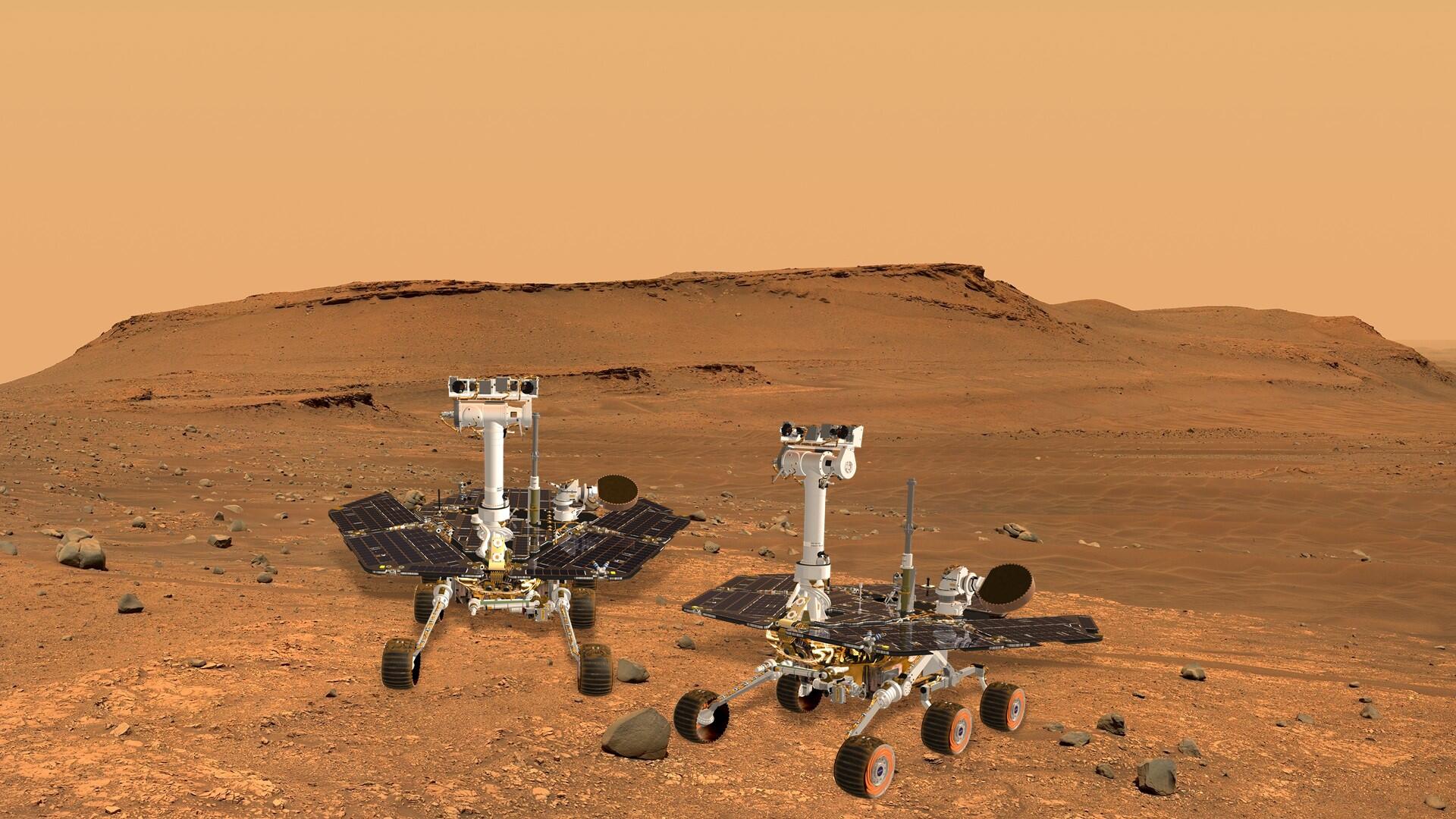
Spirit Opportunity
NASA’nın ikiz gezicileri Spirit ve Opportunity, 3 Ocak ve 24 Ocak 2004 PST (4 Ocak ve 25 Ocak UTC) tarihlerinde Mars’a indi. Geziciler, Mars’ın erken dönemlerindeki çevre koşullarına ilişkin jeolojik ipuçları aramak ve bu ortamların yaşama elverişli olup olmadığını değerlendirmek üzere 90 günlük görevler olarak planlandı.
Spirit, orijinal tasarımından 20 kat daha uzun süre dayandı ve görevini 22 Mart 2010’da tamamladı. Opportunity, Mars’ta yaklaşık 15 yıl çalıştı ve kilometre sayacına en fazla kilometre kat ederek sürüş rekorunu kırarak görevini 13 Şubat 2019’da sonlandırdı. .
Spirit, 2004’ten 2010 yılına kadar Mars’ta faaliyet göstermiş olan robotik bir keşif aracıydı. Keşif aracı, 2009 sonlarında pillerinin şarj olmasını engelleyecek bir açıyla bir “kum kapanına” sıkışıp kaldı. Dünya ile son iletişimi ise 22 Mart 2010 tarihinde gerçekleşti.
Opportunity, 2004’ten 2018 yılına kadar Mars’ta faaliyet göstermiş olan robotik bir keşif aracıdır. Opportunity, Mars’taki 2018 gezegensel toz fırtınası nedeniyle 10 Haziran’da iletişimini kesti ve 12 Haziran 2018’de kış uykusuna girdi. Hava açtıktan sonra yeniden başlatılacağı umuluyordu fakat öyle olamadı.
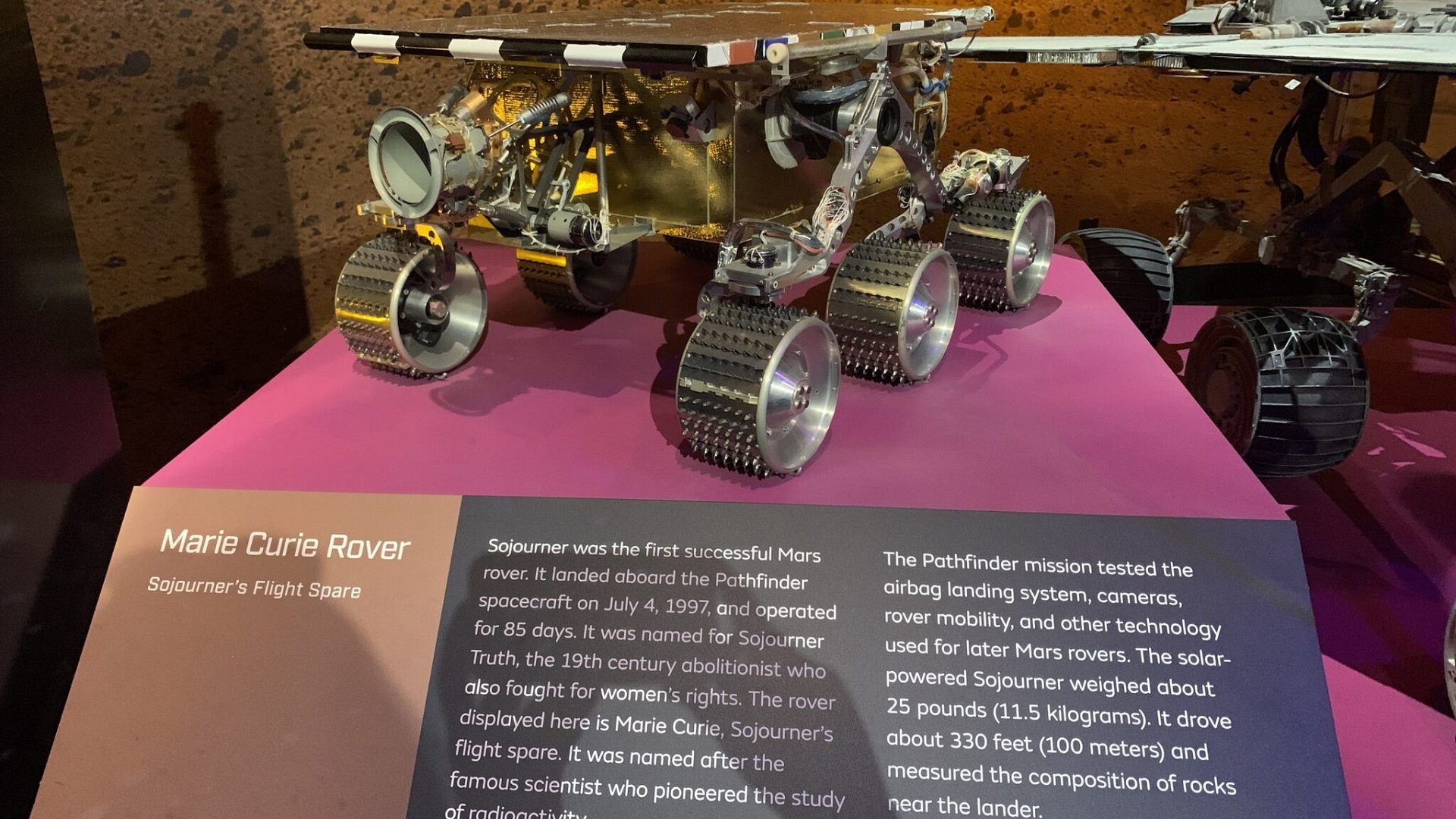
Marie Curie Rover
Marie Curie gezicisi, Sojourner gezicisinin uçuş yedeğiydi. Sojourner’ın Mars’taki faaliyetleri sırasında mühendisler, Marie Curie’yi Kaliforniya’daki Jet Propulsion Laboratory’de (JPL) Mars benzeri bir test alanında aynı hareketlerle çalıştırdılar.
NASA bir süre Marie Curie’yi 2001’de Mars misyonuna göndermeyi planladı ancak bu misyon gerçekleştirilmedi.
Bugün bu iki gezici (biri hâlâ Mars’ta ve onun ikizi de dünyada), hareketli bir araçla Mars yüzeyinin ilk başarılı keşfini temsil ediyor, JPL, Marie Curie gezicisini 2015 yılında Müzeye devretti.
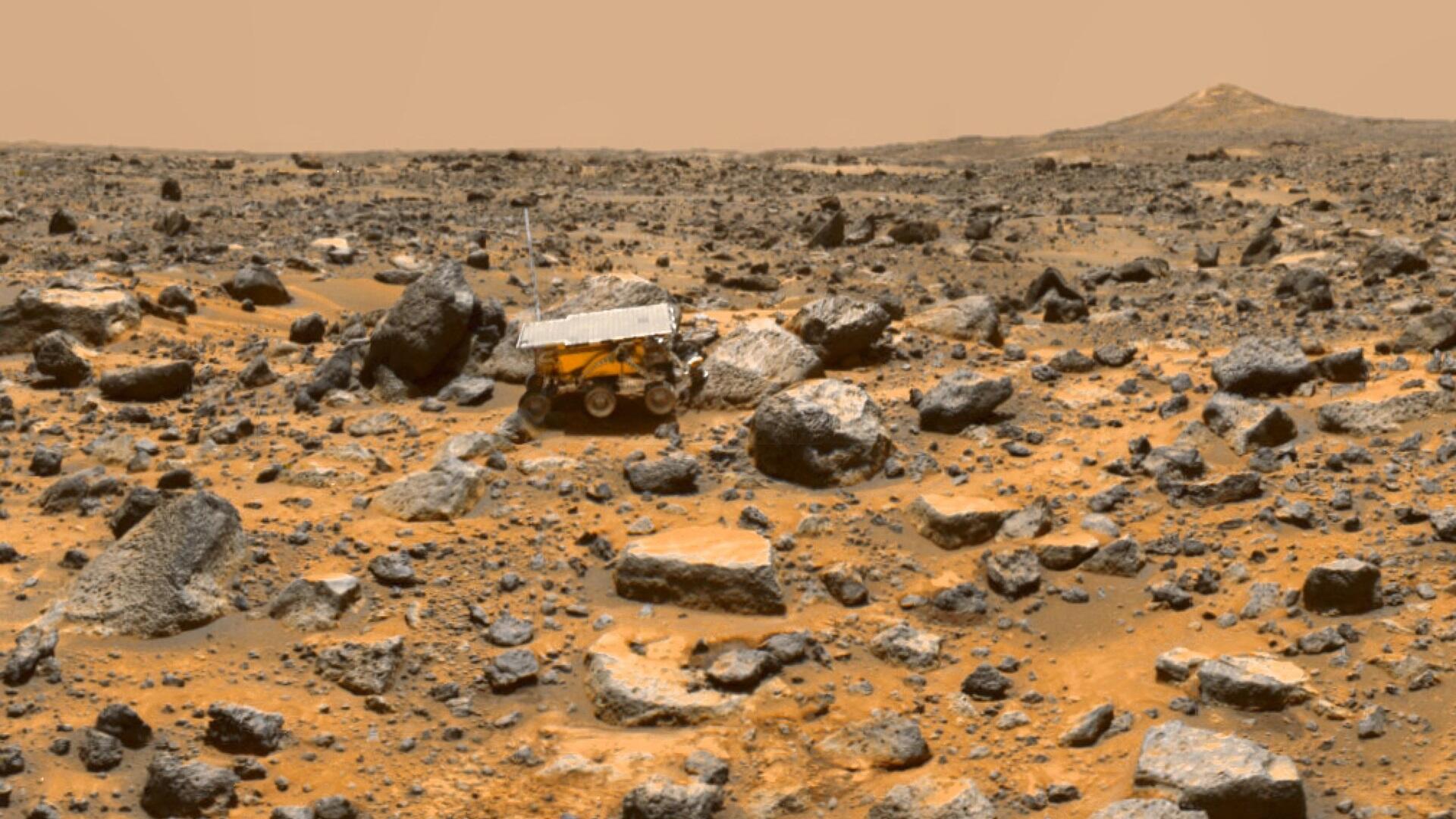
Sojourner Rover
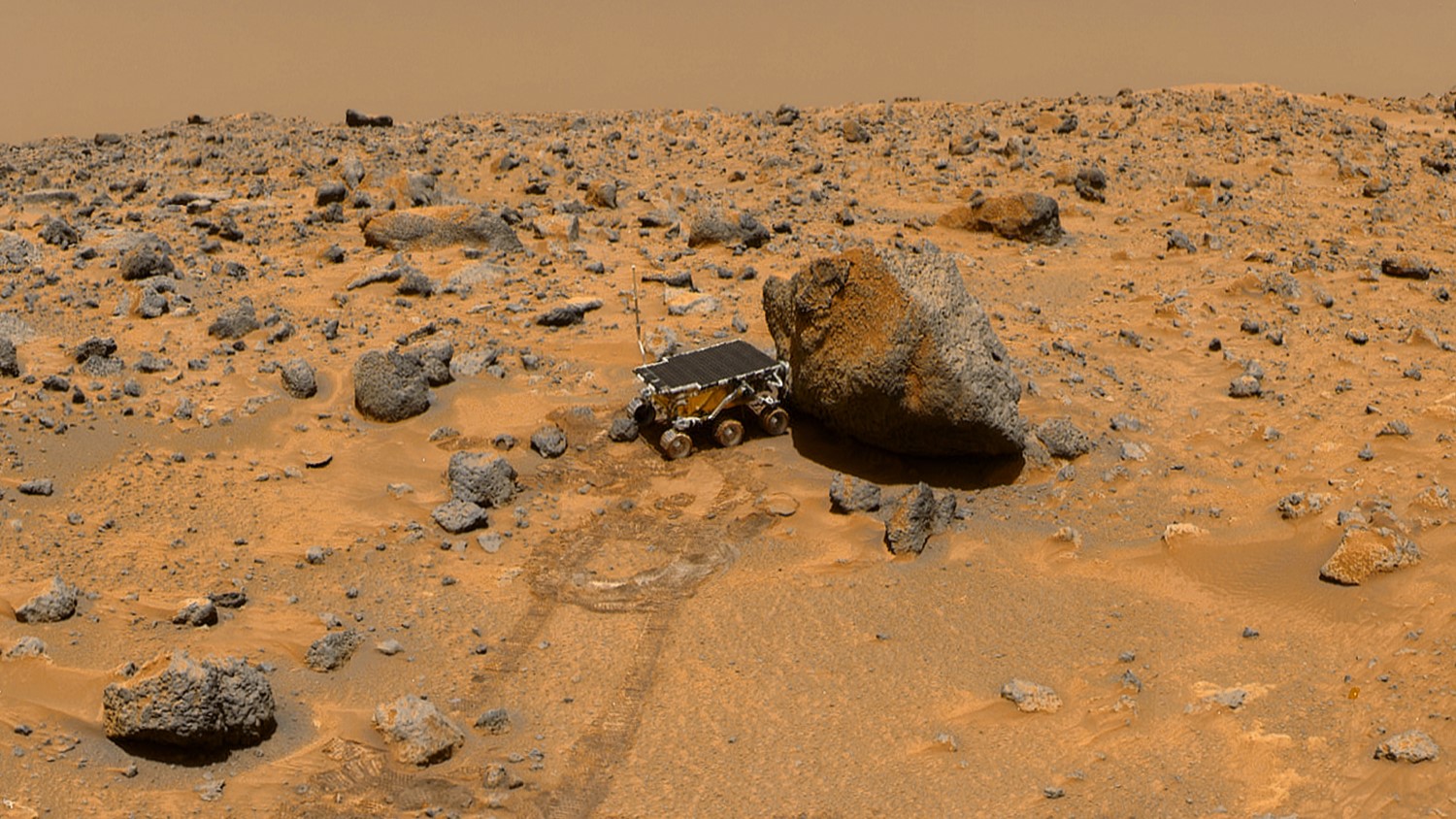
Mars Pathfinder Mission Projesi ile gönderilen Sojourner Rover, 4 Temmuz 1997’de Mars’a ulaştı. Pathfinder’ın Ares Vallis iniş sitesinin bu panoramik görünümü, Sojourner Rover’ı uzaktan gösteriyor. Mars Pathfinder Mission, son başarılı veri iletim döngüsünü 27 Eylül 1997’de EDT saat 6: 23’te tamamladı.
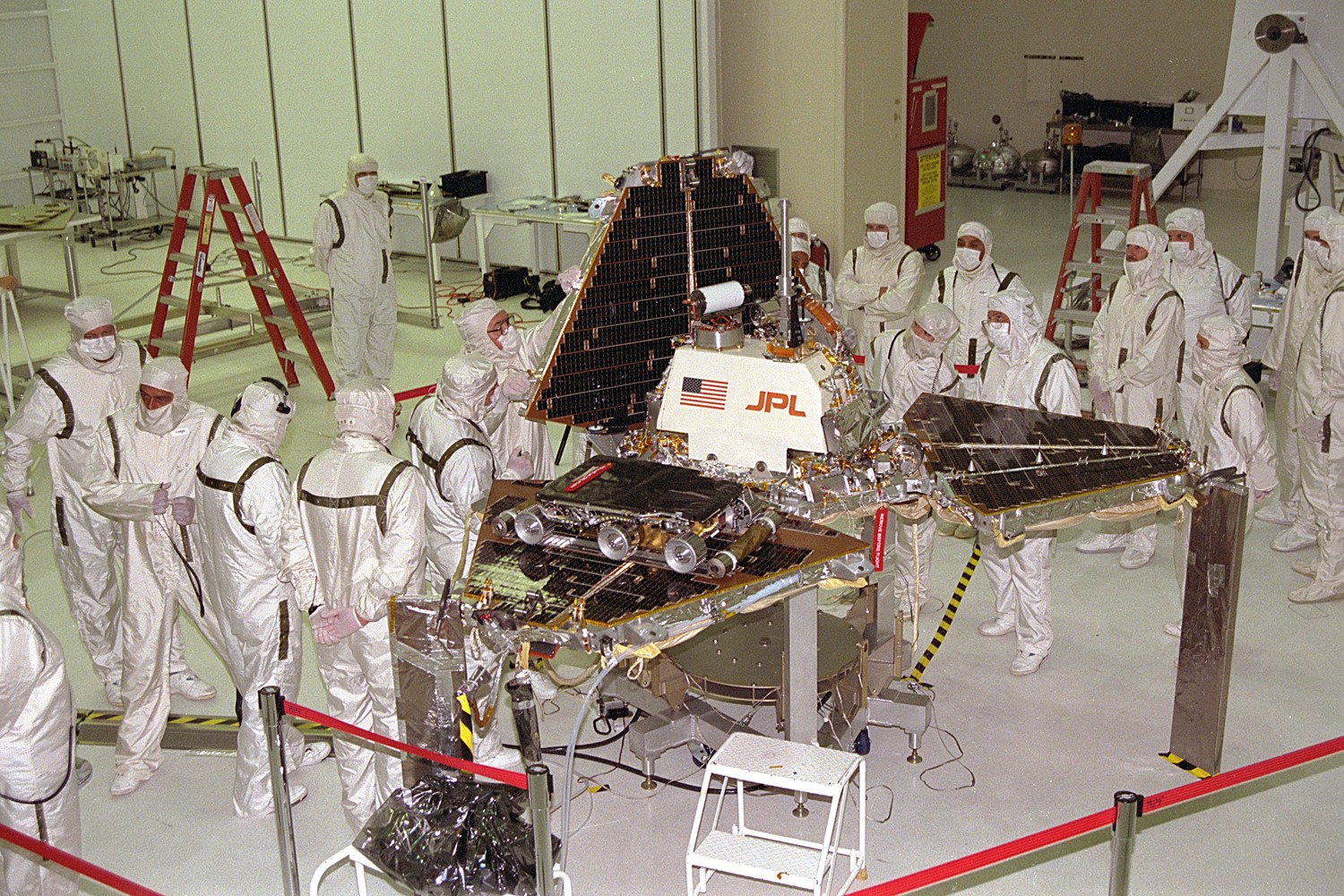
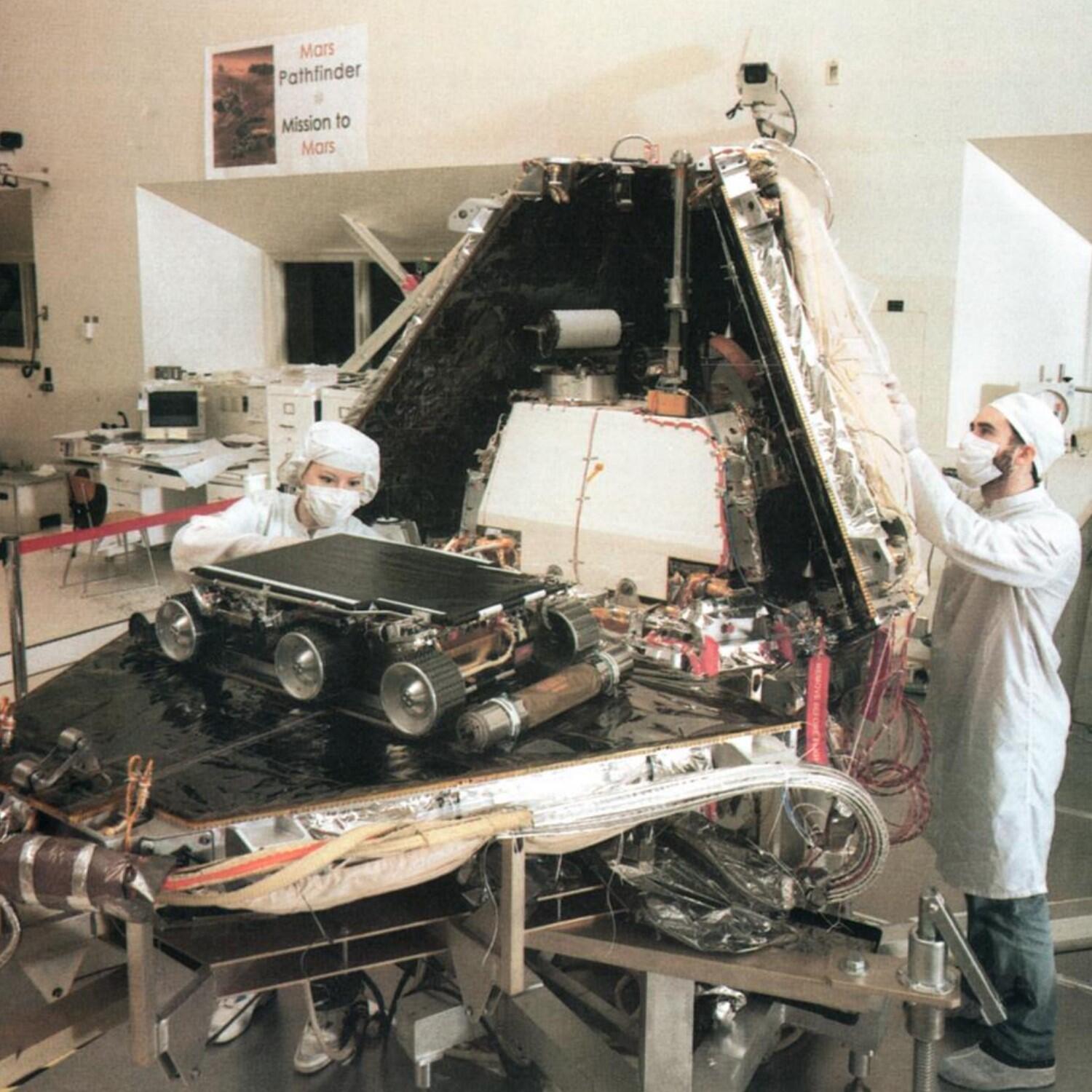
Bilim İnsanlarının Pathfinder Lander’a Sojourner Rover’ı yerleştirme aşamasında çekilen bir fotoğraf karesi.
Sojourner, 4 Temmuz 1997’de Oxia Palus dörtgeninin Chryse Planitia bölgesinde bulunan Ares Vallis kanalına inen robotik bir Mars keşif aracıydı ve 95 Dünya günü boyunca işlevsel kalabilmişti.
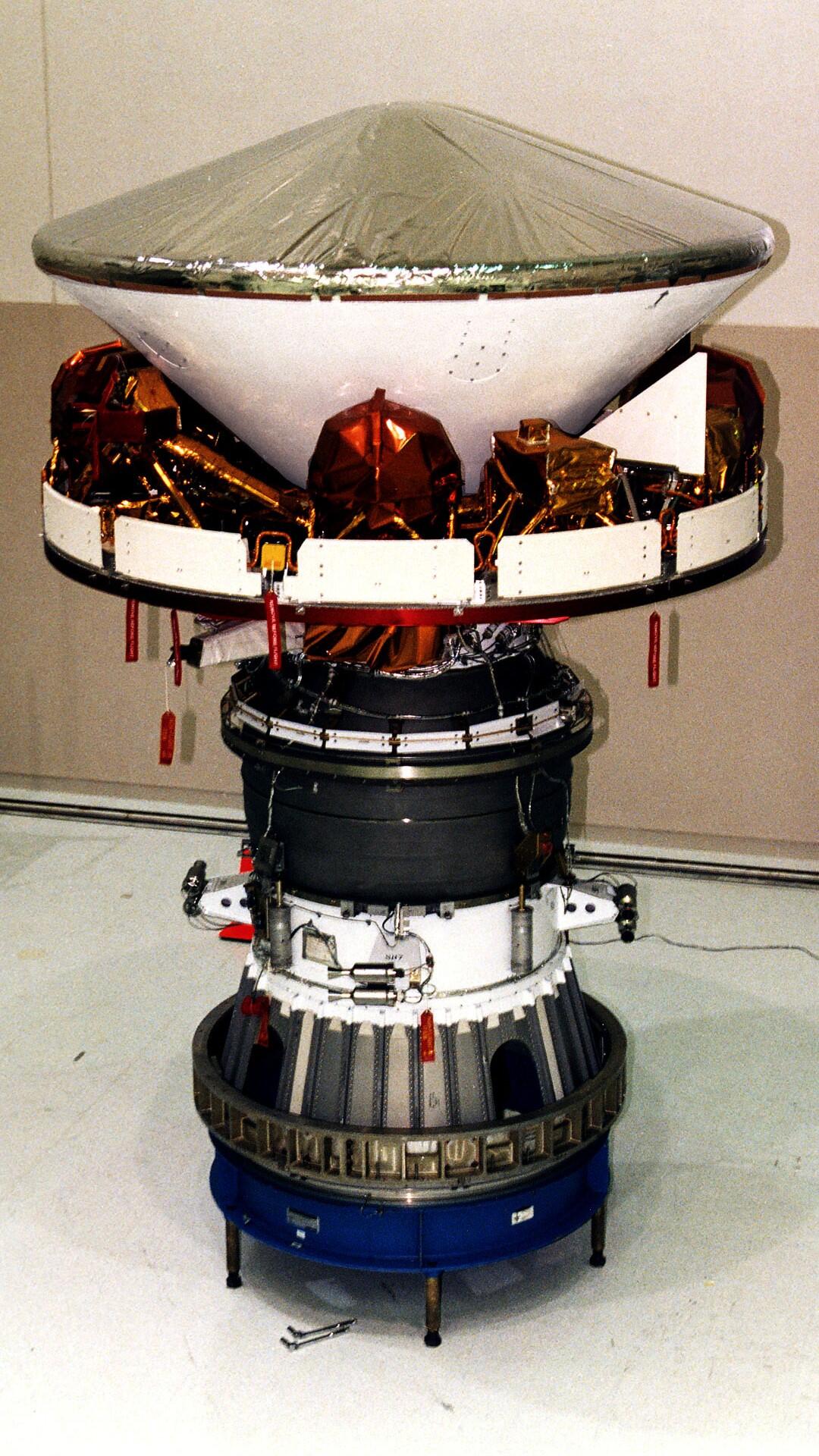
Aeroshell ve Cruise Ring ve Solid Roket Engine, son montaj sırasında Mars Pathfinder.
Dünya dışında başka bir gezegende dolaşan ilk tekerlekli araç olma ünvanına sahip olan Sojourner, Mars Pathfinder görevinin önemli bir parçasını oluşturdu.

Cape Canaveral Hava İstasyonundaki Fırlatma Kompleksi 17B’deki görevliler, uçuş için koruyucu bir yük kaplamasının içine kapatılmadan önce Mars Pathfinder’ı son bir kez kontrol ediyorlar. Pathfinder ve PAM-D üst kademe güçlendiricisi, uzay aracını yörüngeye itecek olan Delta II harcanabilir fırlatma aracının üzerine yerleştirilmiştir.
Mars Pathfinder Lander, 1976’daki Viking misyonundan bu yana kızıl gezegenin yüzeyine inen ilk (Lander sabit olan Rover ise hareketli olan) uzay aracıydı.
4 Aralık 1996’da fırlatıldı, 4 Temmuz 1997’de Mars’a ulaşan uzay aracı, gezegenin ince atmosferine girdi ve yavaşladı sonra paraşütle serbest bırakıldı, ardından roketlerle konuşlandırıldı, ardından da şişmiş hava yastıklarına sarılıp zemine çarparak yere indi.
Yüzeye çıktıktan sonra, koruyucu hava kabuğu üç düz platform ve rampa oluşturacak şekilde açıldı; bunlardan birinde bir gezici araç (Sojourner) bulunuyordu.
Sojourner gezgini rampalardan birinden aşağı indi ve öndeki iki siyah beyaz kamerayı ve arkadaki renkli kamerayı kullanarak yüzeyin yakın çekim görüntülerini almaya başladı.
Gezici ayrıca yüzey toprağı ve kayaları hakkında toplu element bileşimi verileri sağlayan, arkaya monte edilmiş bir Alfa Proton X-ışını Spektrometresine de sahipti.
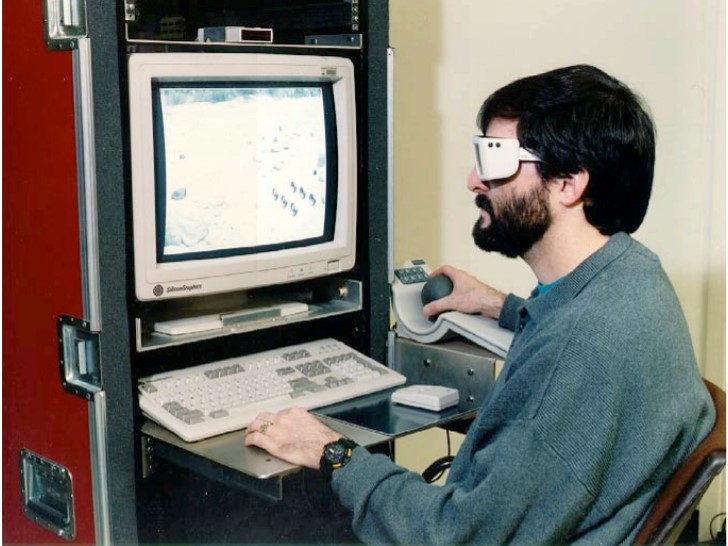
Rover Kontrol Yazılımı: Sojourner operasyonu, Dünya’da Silikon Graphics Onyx2 bilgisayarında çalışan ve komut dizilerinin grafik bir arayüz kullanılarak oluşturulmasına izin veren “Rover Control Software” (RCS) tarafından desteklendi.
Planlama: Rover sürücüsü, baz istasyonundan imgelerle tedarik edilen 3D gözlük takacak ve özel bir joystick ile sanal bir modeli hareket ettirecekti. Rover sürücüleri Brian K. Cooper ve Jack Morrison’dı.
Kontrol yazılımı, gezici ve çevredeki arazinin herhangi bir açıdan görüntülenmesine izin verdi, arazi özelliklerinin incelenmesini, yol noktalarının yerleştirilmesini ve sanal üst geçitleri destekledi.
Dartlar, gezginin nereye gitmesi gerektiğini göstermek için simgeler olarak kullanıldı. İstenen yerler bir diziye eklendi ve performans sergilemek için gezgiye gönderildi. Tipik olarak, günde bir kez uzun bir komut dizisi oluşturuldu ve gönderildi.